|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
農業のためのツールとメカニズム
トロリー付きのモトブロック。 図面、説明
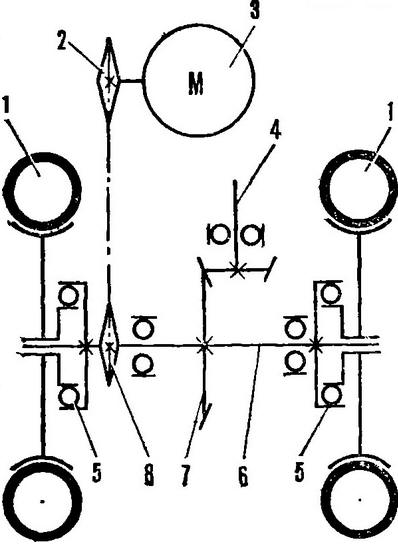
この歩行型トラクターは、チェルニウツィー地域ケルメンツィ市の SPTU No. 25 の「若手技術者」サークルのメンバーによって製作されました。 その助けを借りて、ジャガイモの区画が処理され、草が刈られ、商品が輸送されます。 歩行型トラクターのレイアウトは、フレーム、エンジン、二輪シャーシという伝統的なものです。 必要に応じて、それらは動力伝達シャフトによって駆動される芝刈り機の前に接続されます。 後ろ - サポートホイールを備えた単一船体のプラウ。 耕運機またはハローの XNUMX 本のランセット足 (ヒッチを介して)。 カーゴトロリー(ヒンジアセンブリを介して)。 多くの同様の機械と同様に、Vyatka および Electron スクーターのコンポーネントとアセンブリが歩行型トラクターとトロリーの設計に使用されました。 VP-150Mのエンジン、ホイール、フレーム、ステアリングホイール、電装品、シートです。 車輪は廃止された耕運機から、コンベアシャフトのベベルギヤドライブ、カッターバー、リールから - ZhVN-6ヘッダーから、オーバーランニングクラッチから - SZUG-3、6穀物播種機から、燃料タンクから - トリガーモーターから取られました。 YuMZ-6 トラクターの。 歩行型トラクターのトランスミッションは機械式のギアチェーンです。 これは、歯数 10 と 44 の 19,05 つのスプロケット、ピッチ 1,4 mm のチェーン、およびパワーテイクオフシャフトの前方に配置されたギア比 XNUMX の XNUMX 対のかさ歯車で構成されています。 手押しトラクターのテクニカルデータ
トランスミッションの差動装置は、ホイールロック機構の導入が必要になるため廃止されました。これにより、第一に設計が複雑になり、第二に、狭い敷地内での操作が困難になります。 そのため、駆動輪の滑りを許容するオーバーランニング クラッチを XNUMX つ使用しました。 歩行型トラクターの動力ユニットはフレームです(図3)。 これは、クロスメンバー - 75x40 mmのコーナーに基づいており、そこに14,2つの穴(Ø 12,2 mmが12つ、Ø XNUMX mmがXNUMXつ)が開けられています。 XNUMX 本の MXNUMX ボルトがフレームの内側から後者に溶接されています。 農機具のアタッチメントやカーゴトロリーのヒンジ付きアセンブリの取り付けに使用されます。
左側では、キャリアビームがクロスメンバーに溶接されています。コーナーは67x67 mmで、ギアボックスハウジングの下の垂直棚に166x39 mmの切り欠きがあります。 ビームは、前部でパーキング バイポッド ブラケットのサポートで終わります。 右側では、200x38x8 mm のキャリア プレートが、ギアボックスを固定するためにビームと同様に設計されたクロスバーに溶接されています。 エンジン下のフレーム (図 5) は 280x40x8 mm のプレートで、その中央に 76X5 mm のパイプからのエンジン取り付けクランプが溶接されています。 ここには、歩行型トラクターのフレームに対してエンジン下のフレーム全体を移動させてドライブ チェーンに張力を与えるための細長い穴も開けられました。
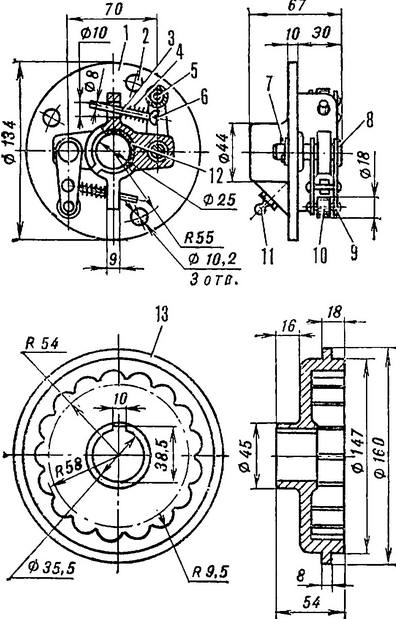
垂直ロッド - 直径 20 mm のバー - が前面のプレートに溶接され、フロント エンジン取り付けブラケットがそれに溶接されます - 水平棚の縦穴のある 20x20 mm の角で、エンジンの位置を調整するのに役立ちます。エンジンをフレームに固定し、チェーンのスキューを解消します。 クラッチ ケーブル シース ストップを取り付けるために、コーナーの垂直棚に 20x6 mm の切り欠きが作られました。 出力軸からのトルクはドライブスプロケットを介してチェーンに伝達され、 これは、ハブ (歯が Ø 34 mm まで削られた Vyatka スクーターの古いスプロケット) と、中央の穴が Ø 30 mm の 4 枚歯のスプロケットで作られています。 図 XNUMX に示すように、これらは溶接されています。 組み立てると、歩行型トラクターは小さくなります。 スクーターエンジンの標準マフラーをさらに小型化するため、純正品と遜色のないコンパクトな自作マフラーに交換しました(図13)。 その製造には、Vyatkaマフラーの一部、つまりベルト付きパイプが使用されました。 直径 75、高さ 65 mm のカップに挿入され、溶接によってリングに接続されます。 ガラスには排気ガスを排出するための穴が開けられています。 マフラーはエンジンシリンダーの排気ポートに直接取り付けられています。 エンジンはスクーターと同様にキックスターターで始動します。 燃料は重力によってキャブレターに流れます。 ギアシフトは、ギアボックスセクターに溶接されたレバーによって実行されます。 ただし、ウォークビハインド トラクターの主な制御装置 (ガソリン レバーとクラッチ レバー) は、カーゴ トロリーのアタッチメントとステアリング ホイールの制御ノブに表示されます。 図 6 に歩行型トラクターのブリッジを示します。オーバーランニング クラッチを取り付けるには、ギアボックスのシャフトを 170 mm (左側で 100 mm、右側で 70 mm) 長くする必要がありました。 これを行うために、中央の穴 Ø 8、深さ 30 mm を両端に開け、M10 ネジを切りました。 長さ 130 mm と 100 mm のロッドをそこにねじ込み、シャフトに溶接し、Ø 25 mm に機械加工し、長さ 20 mm の M40 ネジを端に切りました。 コッターピン用のドリル穴 Ø 3,2 mm。 シャフトの左端には、歯数 44 のドリブン スプロケットと左側のオーバーランニング クラッチの先端部分が共通のキーに取り付けられていました(このために、シートは Ø 35,5 mm に機械加工され、キー溝はフライス加工されました)。 シャフトの右側にも同じ溝を作りました。 カップリングの駆動部分は変更されておらず、耕運機のホイールディスクを取り付けるために XNUMX つの穴が開けられただけです。 もちろん、必要に応じて、新しいランニングシャフトを作成することも可能です。それを図 7 に示します。 オーバーランニングクラッチ(図8)は次のように動作します。 シャフトが回転すると、セルを備えた先頭部分が従動ローラーに寄りかかり、従動ローラーを回転させます。 歩行型トラクターを回転させるとき、より大きな半径の円内を移動する車輪はシャフトよりも速く回転し、クラッチの先頭部分は駆動されるものよりもそれぞれ速く回転します。 したがって、ローラーはスプリングを圧縮して細胞表面を滑ります(柔らかいクリック音が聞こえます)。 ホイールの回転速度が低下すると、ローラーがセルと再び係合します。 各オーバーランニング クラッチの被駆動部の内腔にはナイロン ブッシュが圧入されています。 「走行シャフトとスリーブ」の界面は、オイラーを介してグリースで潤滑されます。 取り付け(図9)にはカルチベーターユニットを使用しました。 ツインロッドは短縮され、ドッキングチャネルに溶接されます。 また、歩行型トラクターに取り付けるための縦方向の穴もあります。
タイロッドの端には、ラック用の穴と止めネジを備えた農機具のブラケット ホルダーが付いています。 コントロールハンドルのパイプは上からチャンネルに溶接されます。 端は平らにされ、ガソリンレバーとクラッチレバーを備えたステアリングホイールを取り付けるために穴が開けられています。 ヒンジ アセンブリ (図 12) はスクーターのステアリング シャフトから作られています。 シャフトを460mmに短くし、自動車の駆動系ジョイントのヨークを下から溶接します。 相手のフォークを取り外し、長さ 135 mm のプレートを置き、十字の端に溶接しました。 プレートの下端は面取りされており、チャネルに溶接されています。 後者の場合、手押し型トラクターのフレームにトロリーを取り付けるための縦方向の穴も開けられました。 ヒンジ アセンブリにはオイラーを介して潤滑されます。 トロリーフレーム (図 11) の中心には、Vyatka または Electron スクーターのフレームがあります。 下から、35x35 mm、長さ870 mmの500つの角がそれに溶接されます。 それらの後部自由端は、長さ 35 mm の 35 番目の角で接続されています。 また、Vyatka のフロント サスペンションには XNUMX 本のフォークがあり (ホイール ブレーキ ドラム ハウジングのストップが右側のフォークに溶接されています)、水平の XNUMX インチ パイプで相互接続されています。 XNUMXxXNUMX mm のコーナーで作られた U 字型のサブフレームも、サブフレームとスクーターのメインフレームに溶接されています。 本体を取り付けるには、水平パイプに XNUMX つのヒンジブッシュが取り付けられます。 シンプルな本体ロック機構は、サブフレームの横角に取り付けられています。ロック レバー、アイレット、スプリング、ガイド スリーブです。 ロッキングレバーのハンドルから 190 mm の距離に、Ø 2,5 mm の穴を開け、スプリングが当接する割りピンを挿入しました。 作動位置では、ラッチの先端が本体取り付け部の前部のループに入り、固定されます。 台車本体のフレーム(図10)は20×20 mmの角で作られ、厚さ1,5 mmの鋼板で覆われています。 本体を輸送位置に固定するためのループが前面に溶接されており、側面からはヒンジブッシュに接続するためのループがあり、そこに指が挿入されます - 鋼棒Ø 17 mm。 結論としては、歩行型トラクターの操作は簡単であるとは言えません。 たとえば、私たちのサークルのメンバーは、180回のレッスンでマスターします。 歩行型トラクターは荷物の運搬にも便利です。 ドライバーは、短縮して XNUMX 度回転させたシート (その下に工具箱あり) に座り、ステアリングホイールに残された標準ハンドルを握り、ウォークビハインド トラクターを制御します。 著者: V.ニキチュク
▪ 電気おろし金 ▪ 多目的ショベル
バルク物質の固化
30.04.2024 埋め込み型脳刺激装置
30.04.2024 時間の感覚は何を見ているかによって決まります
29.04.2024
▪ ソーラーパネル LG NeON R および NeON R Prime ▪ Acer は低予算のラップトップ市場で Asustek と競合する ▪ PC用SilverStone LSB02バックライトコントローラー ▪ やせ遺伝子
▪ 敷地内のセクション 個人の移動手段: 陸、水、空。 記事の選択 ▪ 記事 そして、誰かが彼の差し伸べた手に石を置きました。 人気の表現 ▪ 記事 クモはどのようにして空中を長距離移動するのでしょうか? 詳細な回答 ▪ 記事 自動ヘッドライトとパーキングライト。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |













 他の記事も見る セクション
他の記事も見る セクション 