|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 圧電センサーの状態を遠隔監視する装置
無線電子工学と電気工学の百科事典 / セキュリティデバイスとオブジェクトシグナリング 事故の結果の危険性により、測定チャネル、とりわけセンサーの信頼性に対する要件を強化する必要があります。これは、この施設に存在する最も困難な条件で動作するためです。 定期的(通常は年にXNUMX回)の検証よりも頻繁に測定手段としてその特性を制御する必要があります。 センサーは手の届きにくい場所(ユニットのケーシングの下など)に設置されることが多いため、遠隔操作で制御する必要があります。 記載された装置に実装され、それを可能にする制御方法[1]は、センサーの圧電トランスデューサーが可逆的であり、機械的作用を受けると電気信号を生成し、電気的電圧が印加されます。 どちらの場合も、衝撃に対する応答のレベルは、ピエゾモジュラスと呼ばれる同じ係数によって決定されます。 機械システムとしてのセンサーの慣性は、主にセンサー自体の特性に依存する自由振動の周波数によって決まりますが、センサーと接触する物体の部分の機械的特性にも依存します。 これを設置共振周波数(UR)と呼びます。 電気的慣性は機械的慣性とは関係がなく、センサーとケーブルの静電容量とその負荷のアクティブ抵抗の積によって最初の概算で決定されます。 センサーによって測定された振動の周波数スペクトルは、常に SD の周波数より下にあり (そうでない場合、測定結果は信頼できなくなります)、原則として、その値の 0,2 から 0,3...XNUMX までの領域を占めます。 説明されている制御装置に接続するには、センサーが動作する機器から切り離されます。 一定の電圧が印加されると、静電容量が充電され、圧電素子が変形します。 この操作の期間は、すべての一時的な機械的および電気的プロセスが終了する時間があるようにする必要があります。 その後、電圧源をセンサーから切り離し、センサーの静電容量をほぼ完全に放電するのに十分な時間(通常は数十マイクロ秒)、小さなアクティブ抵抗をセンサーの端子に接続します。 圧電素子の機械的変形は同じ速度で変化することはできず、初期状態への復帰は周波数 SD の減衰振動の形で発生します。 圧電素子は、これらの振動を電気信号に変換します。電気信号は、たとえばストレージ オシロスコープによって記録されます。 センサーの正常な状態の兆候は、繰り返し監視中の信号の形状とレベルの不変性です。 制御装置の主なノードは、閉鎖間隔と登録間隔の持続時間を設定する XNUMX つの単一バイブレータと、XNUMX つのスイッチです。 閉鎖の安定した持続時間でのパルスの減衰による振動の励起は、計測操作に必要な電気信号のレベルと形状の良好な再現性を達成することを可能にします。 説明されているデバイスのバージョンは、やや複雑です。 ストレージオシロスコープは高価で比較的珍しいデバイスであるため、制御プロセスを周期的にすることで、従来のオシロスコープを使用できるようになりました。 SDの周波数を決定する際の信頼性を高めるために、高周波干渉を抑制するフィルターが導入されています。 自律的な低電圧電源と、LED インジケータ付きの UR 周波数計があります。
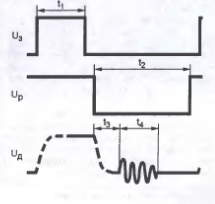
デバイスのスキームを図1に示します。 1.1.エレメントDD1.2およびDD1.2のマルチバイブレータは、矩形パルスを生成します。 エレメントDD1.3の出力から、持続時間tのパルスがスイッチDA1の制御入力に供給されます。 動作中、+ 14 Vの充電電圧が、閉じたスイッチを介して、R15R3HL12回路(図3の曲線U2)を介してコネクタXXNUMXに接続されたセンサーの入力に供給されます。
センサーの静電容量はこの電圧まで充電されます。 HL3 LEDは、センサー回路の短絡を通知するように設計されています。 考慮されたものとは逆のパルスは、エレメント DD1.1 の出力から、微分 (C2R6) および積分 (C4R11) 回路を介してエレメント DD1.3 の入力に到達します。 その出力では、充電パルス間の一時停止に位置するが、一時停止よりも短い期間 t2 を有する低論理レベル パルスが形成されます。 C6R18 微分回路を介して、このパルスの立ち下がりエッジが DA6 タイマーの単一のバイブレータをトリガーし、そのパルスは、R21C7 回路のパラメータによって決定される持続時間 (図 3 の間隔 t2) で、 DA2マイクロ回路の下部(回路による)スイッチの制御入力。 この場合、センサー出力 (コネクタ X3 のピン 1) は、スイッチと抵抗 R12 を介して共通線に接続され、センサー容量を放電します。 センサーの両端の電圧 (図 2 の曲線 U) はゼロまで減少します。 タイマーパルスの立ち下がりエッジは、要素DD6.1およびDD6.3で単一のバイブレーターを開始し、微分回路C4R13が供給されることにより、本質的に振動する持続時間t31(C53R6.2R2回路のパラメーターによって決定)のパルスを生成します。オペアンプDA5のアンプの入力に接続し、その出力に抵抗R16を介して、スイッチSA4をコンデンサC25(「表示」モード)または抵抗R3(「診断」モード)に接続します。 。 最初のケースでは、平滑化フィルターが形成され、8番目のケースでは、周波数に依存しない分圧器が形成されます。 次に、信号は、オシロスコープまたは他のレコーダが接続されているX27コネクタに送られます。 同期パルスは、間隔t2の開始に合わせて同じコネクタに出力されます。 デバイスの残りのノードは、UR周波数計を形成します。 増幅器DA3と電圧コンパレータDA5の助けを借りて、センサー信号は標準振幅の一連のパルスに変換されます。 ゲイン(10または20)はスイッチSA2によって選択され、その状態はLEDHL1およびHL2によって示されます。 コンパレータの出力からのパルスを1ミリ秒間カウントすると、SDの周波数の値がキロヘルツで得られます。 ただし、最新の圧電センサーの自然振動ははるかに速く減衰するため、この方法は受け入れられないことが判明しました。 したがって、合計1ミリ秒の持続時間で、いくつかの短い間隔でパルスをカウントする必要がありました。 実験は、500μsのXNUMXつの間隔で十分であることを示しました。 アカウントは次のように進行します。 SB2の「Set.0」ボタンを押すと、DD2.1カウンタはHL4の「Ready」LEDで示されるカウントの準備状態に設定され、カウンタDD4とDD5はゼロに設定されます。 SB1の「開始」ボタンを長押しするとスイッチDA1.1が開き、エレメントDD1.2の出力からのクロックパルスが開いているスイッチDA1.2を通過してカウンターDD2.1に到達します。 エレメントDD3.2信号の2つの入力は、カウンターの出力4と6.2から来ており、その3.3番目の入力はエレメントDD1の出力から来ています。 その結果、DD8エレメントの出力に高レベルが存在するのは、2.1番目と3.1番目の充電パルス(SB1.2ボタンが押された瞬間から数えて)に続く動作サイクルの間だけです。 2.1番目のパルスはカウンタDD4の出力1でハイレベルを設定し、インバータDDXNUMXを介してスイッチDAXNUMXを閉じます。 カウンタDDXNUMXの入力へのパルスの流れが停止し、HLXNUMXLEDが消灯します。 これで、SBXNUMXボタンを離すことができます。 エレメントDD3.3の出力は、スイッチDA1.4の制御入力に接続され、コンパレータDA5の出力とカウンタDD4の入力の間に接続されます。 カウンターDD4およびDD5のステータスの表示は、通常ではありません。LEDHL5-HL24の8つの1日間のラインを使用します。 これは、消費電流を削減するために行われました。これらすべてのLEDの合計消費量は、いずれの場合も3mAを超えません。 残念ながら、動作温度範囲が不十分なため、さらに経済的なLCDは適していません。 クロストークを低減するために導入されたダイオードVDXNUMX-VDXNUMX。 デバイス内のすべてのコンデンサはセラミックであり、C7 と C13 の TKE は小さい必要があります。たとえば、マイカなど、それらは異なる場合があります。 サーモスタブル (たとえば、C2-31) も抵抗 R21 と R31 にする必要があります。 スイッチ - 小型の B1561 をスライドさせます。 ただし、SA3 の代わりに、PS580N などの切り替え接点を備えたボタンを使用することをお勧めします。 ボタンを離したときの接点の位置は、図の図に示されている位置と一致している必要があります。 1。 コネクタ X1 のタイプは、どのセンサーが最も頻繁にチェックされるかによって異なります。 国内の産業用振動センサーの大部分は、ケーブルソケットRS-4TVを備えた圧電加速度計ABCおよびANSであるため、著者はブロックプラグRS-4TVを使用しました。 1.この場合、取り外し可能な接続には耐振動性が必要ないため、プラグ本体の雄ネジを慎重に取り外すことをお勧めします。これにより、センサーの接続と取り外しのプロセスが容易になり、スピードアップします。 他のタイプのセンサーは、適切なアダプターを介してデバイスに接続できます。 コネクタ X2 は、ONTS-VG-2-3/16-p などの任意のコネクタにできます。 接続するケーブルの信号線はシールドする必要がありますが、クロック信号線はシールドする必要はありません。
このデバイスは、サイズAAの12〜0522個のガルバニ電池のバッテリーで駆動され、その電圧は、図2に示す回路に従って接続されたTMR3コンバーター[1]を使用してバイポーラ安定化+/-7,5Vに変換されます。 130.GB145のバッテリー電圧がXNUMXVの場合、「診断」モードと「表示」モードで消費される電流は、それぞれXNUMXmAとXNUMXmAです。 このデバイスは、上下にXNUMXつのボード上に組み立てられ、リボンケーブルで接続されています。 コントロールとLEDは上部ボードに取り付けられ、残りの要素は下部ボードに取り付けられます。ただし、コネクタは別のコーナーパネルにあります。 ボディは準備完了で選択されています。 ほとんどのアクティブな要素は外部補正のない論理ゲートとオペアンプであるため、適切に配線されたデバイスをセットアップするのに多くの労力は必要ありません。 要素 DD1.1、DD1.2 のマルチバイブレータが繰り返し率 30 ± 5 Hz の対称矩形パルスを生成することを確認した後、要素 DD1.3 の出力でのパルスの位置と形状を確認する必要があります。 .
4ビームオシロスコープがない場合、これには最も単純な加算器を使用できます。その回路は図に示されています. 四。
出力での信号のオシログラムは、図に示す形式である必要があります。 ここで、t5とt1は図2と同じ間隔です。 2.抵抗R6とR11を選択し、充電パルスの終了後2〜0,3ミリ秒後に間隔t1が開始することを確認します。 その期間は5〜10ミリ秒である必要があり、正確な値は重要ではありません。 DA6タイマーによって生成されるパルスの持続時間は、20〜30μsの範囲である必要があります。 ただし、DD6.2エレメントの出力でのパルス幅は、可能な限り最高の精度で53μsに等しいチューニング抵抗R500を使用して設定する必要があります。 これは、SD周波数の測定誤差に直接影響します。
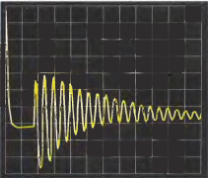
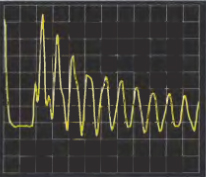
さらに調整するには、圧電センサー (加速度計) が必要です。変換係数はミリボルト/メートル/秒/秒程度で、自由振動周波数 (SD 周波数よりも高い) は 10 kHz を超えます。 センサーをコネクタ X1 に接続することにより、コネクタ X2 に接続されたオシロスコープのコントロールは、図 6 に示すものと同様に、画面上で安定した画像を実現します。 8-6. これらは、センサーの状態に対する信号の依存性を示すオシログラムを示しています。緩い (図 7)。 取扱説明書に厳密に従って取り付けられています(図8)。 取り付けられていますが、制御構造への固定が緩んでいます(図50)。 縦軸と横軸に沿ったオシログラムのスケールは、それぞれ 50 mV/div です。 およびXNUMXμs/div。 励起された振動の再現性は、励起を1,5回繰り返してオシログラムの特徴点の位置を測定した結果によって特徴付けられます。 拡散は 9% を超えず、使用した S8-XNUMX ストレージ オシロスコープの誤差と実質的に一致しました。 オペアンプDA3の出力に信号の歪みがないことを確認することが望ましいです。 実際には、それらはありそうになく、異なるタイプのセンサーの減衰振動の範囲はわずかに異なり、数百ミリボルトを超えません。 コンパレータDA5のシュミットトリガの動作を確認するときは、入力の信号と出力のパルスの周期数を比較する必要があります。 トリガーしきい値は、抵抗R19およびR23の選択によって設定されます。 センサーの最初の制御は、特に長期間のノンストップの操作対象物で動作するように設計されており、設置直後に実行することが望ましいです。 この場合、すべての要件(座面の許容される非平坦性と粗さ、ねじ山の締め付けトルク、汚染がないことなど)が満たされているかどうかがすぐに明らかになります。 それらの違反は、SDの周波数を大幅に低下させる可能性があるため、センサー信号は振動の性質を正しく反映しません。 その結果、オブジェクトの緊急停止に対して誤ったコマンドを生成する可能性があります。 得られた結果 (SD の周波数とスイッチ SA2 の位置をカウント) が記録され、後続の制御サイクル中にセンサーの状態を評価するための基礎として機能します。 観察された偏差は、センサーの状態をより詳細に調査し、修理または交換する必要があるかどうかを判断するための基礎として役立ちます。 これは、制御が停止したユニットで実行されることを意味します。 その温度は必ずしも一定ではなく、使用される効果はその変化に敏感です。 前述のように、振動の励起プロセスの両方の段階で、衝撃に対する反応は圧電係数の値によって決定されます - トランスデューサ材料の特性は、その微細構造の規則性の程度に依存し、減少します温度の上昇とともに。 この場合、電気信号の振幅は圧電係数の 250 乗に比例し、それに応じて温度依存性が強くなります。 実験によると、最大動作温度が 120 °C のセンサーの信号は、6 °C までの温度で制御中に ±20% 以内の不安定性がありました。 したがって、すべての制御サイクルで、温度差が XNUMX °C を超えないことが望ましいです。 この点で、センサーの温度を測定できるデバイスと組み合わせてデバイスを操作することをお勧めします。 操作ユニットで制御を実行できるかどうかは、さまざまな状況によって異なります。 オブジェクトの通常の動作中にセンサーによって記録された振動レベルがセンサーの限界に近い場合、振動スペクトルの上限はSDの周波数、または最終的には温度に近づくとすぐに言えます。センサーが許容最大値に近づいているため、制御できません。 ユニットの計画的なシャットダウン中に実行する必要がありますが、この場合でも、デバイスを使用すると時間が節約され、機械的な作業がなくなります。 上記の状況がそれほど明らかでない場合は、施設の起動前および操作中に制御を実行する必要があります。 結果を比較することで、十分な情報に基づいた決定を下すことができます。 説明されているデバイスの組み込みインジケータのみを使用した制御は、可能性の一部しか実装していないことに注意してください。 センサーの固有振動のスペクトルまたはその他の特性を分析すると、その状態をより正確に評価できるだけでなく、センサーが取り付けられているオブジェクトのノードの状態に関する追加情報を取得することもできます。 事実は、通常の動作中に得られるセンサー信号のスペクトルの上限は、ほとんどの場合1000 Hzを超えず、時にはさらに低いことです。 オブジェクトの小さな欠陥は、振動スペクトルの性質にほとんど影響しません。 また、制御中のスペクトルは比較にならないほど広いため、それを分析することで、センサーの近くで発生した場合はもちろん、オブジェクトの状況の小さな変化にも気付くことができます。 オシロスコープの代わりに (またはオシロスコープと一緒に) スペクトラム アナライザを X2 コネクタに接続し、SA3 スイッチを「診断」の位置に設定します。 このデバイスは、圧電モジュールの変化によって引き起こされるセンサー変換係数の変化の事実を検出するだけでなく、その新しい値を計算することも可能にします。 最も簡単な手法は、二重制御中に信号を比較することです。最初に、センサーの設置直後、最近の検証のデータが有効なとき、次にセンサーのパラメーターの変化が予想される時間の後で。 両方のレコードで、同じ方法で N 個の振動周期を選択する必要があります。それぞれで信号範囲 (最大値と最小値の差) を決定し、得られた値を合計します。 初期制御中に合計V1が得られ、繰り返し制御中に-V2が得られた場合、繰り返し制御時の変換係数は次のようになります。
ここで、S1 は検証中に得られた変換係数の値です [3]。 次の規格検証までの測定結果の解析に使用できます。 デバイスの別のアプリケーションは、パラメーターの組み立てと調整の段階での圧電センサーの製造に見られます。 オシロスコープ画面では、スイーパーでフィルターを調整するときと同じように、進行中の操作に対するセンサーの応答を明確に観察できます。 この場合、共振周波数だけでなく、変換係数の値についてもある程度の情報を得ることができる。 振動センサーに加えて、場合によっては圧電圧力脈動センサーを制御することもできますが、制御は定性的なものにすぎません。つまり、「失敗した」原則によるものです。 文学 1. サブボット M. 圧電加速度計の共振振動を電気的に励起する方法とその実装のためのデバイス。 RF 特許第 2150708 号。 - Bulletin of Inventions、2000 年、No. 16。
著者:M。Subbotin、モスクワ; 出版物:radioradar.net
タッチエミュレーション用人工皮革
15.04.2024 Petgugu グローバル猫砂
15.04.2024 思いやりのある男性の魅力
14.04.2024
▪ メルセデス・ベンツ トラックのブラインド スポット モニタリング
▪ サイトセクション 充電器、蓄電池、バッテリー。 記事の選択 ▪ 記事 カーセキュリティシステム用センサー。 無線エレクトロニクスと電気工学の百科事典 ▪ 記事 シンプルな電源、220/11-20 ボルト 22 アンペア。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |







 この記事にコメントを残してください:
この記事にコメントを残してください: