|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 エコーサウンダー。 無線エレクトロニクスと電気工学の百科事典
読者の注目を集めたエコーサウンダーは、底の地形を特定し、貯水池の深さを測定し、沈んだ物体を探索し、釣りに最も有望な場所を見つけるために使用できます。 このデバイスはセットアップが非常に簡単で、使いやすく、キャリブレーションは必要ありません。 エコー測深機は、最大 2,5、最大 5、最大 12,5 の 25 つの限界で貯水池の深さを測定するように設計されています。 0,3; 4 および 0,3 m、最小測定深度は 3 m、読み取り値の誤差は、どの測定限界でも上限値の XNUMX% を超えません。 このデバイスには一時的な自動ゲイン制御 (TAG) が装備されており、各測定サイクル中にゲインを最小から最大まで変更できるため、ノイズ耐性が向上します。 VARU の必要性は、水中への音響エネルギーの放射が激しい残響、つまり水の底や水面からの超音波信号の繰り返し反射を引き起こすという事実によって引き起こされます。 したがって、浅い深さでは、エコー信号記録ユニットの誤警報が発生する可能性があります。 VAG のおかげで、XNUMX ~ XNUMX m の範囲の深さを測定する際のデバイスのパフォーマンスが大幅に向上しました。 エコー測深機は、26 個の LED で構成される線形深さスケールをインジケータとして使用し、最大 0,1 つの反射測定限界を表示できます。 インジケーターの情報更新周期は約0,1秒なので、移動しながらの海底地形の監視も容易です。 さらに、エコーサウンダーのノイズ耐性は、ランダムな干渉から保護するソフトウェアパルスフィルターによって強化されています。 フィルターがオンになっている場合、インジケーターには、測定期間 (1 秒) 中に値が含まれる測定限界の 50/316 以下で変化した反射信号のみが表示されます。 このデバイスは 6 つの A7 素子によって電力供給されており、電圧が 8 V に低下してもその機能は維持されます。消費電流は 10 ~ XNUMX mA の範囲です (LED を流れる電流を除く - 点灯している LED ごとに XNUMX mA)。 )。 エコー測深器は、TVG の効率を調整するだけでなく、測定限界や表示される反射数を素早く切り替える機能を提供します。 必要に応じて、パルスフィルターを無効にすることができます。 「SLEEP」モードではすべてのパラメータの値をメモリに保存できます。 このモードでは、デバイスが消費する電流は約 70 μA ですが、バッテリーの耐用年数には実質的に影響しません。 エコー測深機は、機能的に完全な 1 つのユニット、つまり探査パルスの発生器、受信器、制御ユニット、表示ユニットで構成されています (図 XNUMX)。
プロービングパルス発生器の概略図を図2に示します。 XNUMX。
マスター パルス ジェネレーターは DD1 チップ上に組み込まれています。 周波数 600 kHz のパルスを生成し、DD2 チップ上のトリガーによって 3 つに分割されます。 DD1 チップには、複合トランジスタ VT2、VT1、およびトランス T300 を使用したプッシュプル回路に従って作成されたパワーアンプとトリガーを一致させるバッファ カスケードが含まれています。 二次巻線から、周波数 1 kHz の電気振動が圧電セラミック エミッターである BQ12 センサーに供給され、超音波メッセージの形で外部環境に放射されます。 DD13 チップのピン 1、4 と DD6 チップのピン 2、XNUMX に論理 XNUMX レベルがある場合、ジェネレータの動作が許可されます。 各測定サイクルの開始時に、持続時間 50 μs のイネーブル パルスが制御装置から発生器に到着します (図 3)。 デバイスの動作に必要なすべての信号は、シングルチップ マイクロコントローラ DD1 (AT89C2051) によって生成されます。 マイクロコントローラの内部プログラムメモリにある制御プログラムのマシンコードを表に示します。
チェックサムは、Radio-86RK アルゴリズムを使用して計算されます。 1 V の電圧に対する安定化回路はトランジスタ VT4 ~ VT5 で構成されており、消費電流が 25 μA と小さく、制御トランジスタでの電圧降下が 1 V 未満であることが特徴です。トランジスタ VT5 は電源からの電源をオフにします。受信機は「SLEEP」モードにあり、上に示されているように、電流消費が削減されます。
底部から反射したパルス信号は、送信の合間にエミッタセンサーによって受信され、受信機の入力に供給され(図4)、トランジスタVT1、VT2、VT4を使用した7段の共振増幅器によって増幅されます。 VT4-VT5、その後ダイオード VD8、VD9 によって検出されます。 トランジスタ VT1、VT2 のシュミット トリガーは、標準ロジック レベルを形成します。 ダイオード VD3、VD1 はレシーバー入力を過負荷から保護します。 トランジスタVT3はVAG制御要素の機能を実行し、トランジスタVT1、VT2のカスケードの利得を広範囲にわたって変化させる。
VAG の最大効率におけるコンデンサ C1 の制御電圧の形状を図に示します。 5.
コンデンサの充電時間は回路 R2C1 の時定数によって決まり、下側の電圧レベルは抵抗器 R4 の抵抗値と制御装置からの放電パルスの継続時間によって決まります。放電パルスの継続時間は 0 ~ 1,25 ms の範囲で変化します。 。 それに応じて TVG の効率が変化するため、特定の動作条件に合わせてエコーサウンダーの感度を迅速に調整できます。 生成された反射パルスは、VT9 コレクタから、さらなる処理のために制御デバイスのマイクロコントローラ DD3.2 のピン P1 に供給されます。 表示ユニットの図を図に示します。 6. これは、出力にエミッタフォロアを備えた 32 つの DD1 ~ DD4 (K561IR2) マイクロ回路上の XNUMX ビット シフト レジスタです。
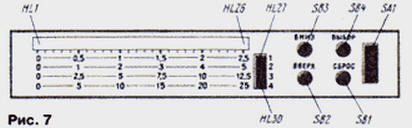
抵抗 R1 ~ R30 は、LED HL10 ~ HL1 に流れる電流を 30 mA に設定します。 この流れにより、どんな天候でもインジケーターがはっきりと見えます。 DD4 チップの最後の 1 ビットは使用されません。 LED HL26 ~ HL27 はインジケータのメイン スケールを形成し、HL30 ~ HL7 は測定限界、表示される反射数、パルス ノイズ フィルタの有無を示します。 フロントパネル上のそれらの配置を図に示します。 XNUMX。
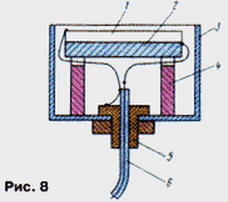
ボタン SB1 ~ SB4 (図 1 を参照) もフロントパネルにあり、これらを使用すると、エコーサウンダーの動作モードをすばやく変更できます。 超音波エミッターセンサーの設計を図に示します。 これは、共振周波数300kHzのTsTS-19圧電セラミックスでできた、直径31μm、厚さ6mmの円形プレート1である。 8 本の MGTF-1 ワイヤがウッド合金を使用してプレートの銀メッキ面にはんだ付けされます。 はんだ付けポイントはプレートの端に位置し、その周囲に均等に分散されている必要があります。
センサーは、直径約 3、長さ 40 ~ 30 mm の酸化物コンデンサーからなるアルミニウム カップ 40 内に組み立てられています。 ガラスの底部の中央には、取り付け具 5 用の穴が開けられており、そこに長さ 6 ~ 1 m のフレキシブル同軸ケーブル 2,5 が入り、センサーを音響測深機に接続します。 センサー プレートは、厚さ 2 ~ 5 mm、直径がプレートの直径と等しい、柔らかい微多孔質ゴム 10 で作られたディスクに接着されています。 ピエゾ素子に半田付けされたリードは、その軸がピエゾ素子の軸と一致するように束ねられます。 設置中、ケーブル編組はフィッティングにはんだ付けされ、中心導体はゴムディスクに接着されたセンサーライニングの端子にはんだ付けされ、もう一方のライニングの端子はケーブル編組に接続されます。 テクノロジラック 4 は、プレートの表面がガラスの端から 2 mm 下に凹むようにプレートの位置を固定します。 ガラスは厳密に垂直に固定され、端までエポキシ樹脂が充填されています。 この場合、気泡が入っていないことを確認する必要があります。 測深器は一般的に使用されている部品を使用しています。 発電コイルL1は直径5mmのフレームに1000NNトリマーで巻かれています。 110 ターンの PEV 0,12 ワイヤーが含まれています。 トランス T1 は、M16NM フェライト製の K8x6x1000 mm リング磁気コアで作られています。 一次巻線は 2 本のワイヤで巻かれ、20x150 のワイヤが含まれており、二次巻線には PEV 0,21 ワイヤが 465 ターン含まれています。 ワニスを塗った生地の層が巻線の間に置かれます。 ポケット受信機のIF回路(1kHz)からフレームに受信コイルが巻かれています。 ループ コイル L3、L5、L90 にはそれぞれ 2 巻が含まれており、通信コイル L4 および L10 にはそれぞれ 0,12 巻の PEV 70 ワイヤが含まれています。 80 kHz の共振周波数が得られるようにコンデンサを選択すれば、300 年代および XNUMX 年代のポケット受信機の既製の IF 回路を使用することもできます。 発電機のコンデンサ C1、C2 と受信機の C5、C9、C13 には小さな TKE (M75 以下) が必要です。たとえば、コンデンサ KSO-G、KM-5、KM-6 が適しています。 受信機コンデンサC1 - K73-17。 赤い長方形のインジケーター LED HL1 ~ HL30 (例: KIPM01B-1K)。 スタビライザーの電界効果トランジスタ VT2、VT4 (図 3 を参照) - KP303、KP307 は任意の文字インデックスを持つが、カットオフ電圧は 2 V 以下です。AT89S2051 マイクロコントローラーは AT89S51 または 87S51 に置き換えることができます。 この場合、ピン番号の違いを考慮する必要があります。 87S51の国内類似品はKR1830BE751です。 外部プログラム メモリを備えた KR1830BE31 マイクロコントローラの使用は、消費電流とデバイスの寸法が大幅に増加するため、お勧めできません。 マイクロコントローラーの内部構造とコマンド システムについては、[1] を参照してください。 他の部分には特別な要件はありません。 すべての音響測深機ユニットは XNUMX つまたは複数のプリント基板に取り付けることができ、その寸法と構成は利用可能なハウジングの寸法と使用する部品によって決まります。 受信機を別の基板に「一列に」実装し、制御装置からできるだけ離れたハウジング内に配置することをお勧めします。 直射日光による加熱を軽減するには、筐体を軽くする必要があります。 エコーサウンダーのセットアップは、抵抗 R5 を使用して、スタビライザーの出力に +5 V 電圧制御デバイスを取り付けることから始まります。 この場合、DD1 チップをソケットから取り外す必要があります。 マイクロコントローラーを所定の位置に取り付けた後、制御デバイスと表示ユニットが動作していることを確認する必要があります。 電源をオンにすると、インジケーターに追加のスケール LED (HL27 ~ HL30) の 2 つが点灯し、測定限界を示します。 SB3「上」ボタンとSB4「下」ボタンを押すと、測定リミットを切り替えることができます。 SB2の「選択」ボタンを3回押すと、表示反射回数を設定するモードに切り替わります。 同様に、SB1 および SB4 ボタンを押すと、この番号を 4 から 2 に変更できます。これは、リミット スケール上の LED の点滅によって示されます。 次回 SB3 ボタンを押すと、VARU の度数を設定するモードが有効になります。これも SB4 または SB2 ボタンによって調整され、メイン深度スケール上の LED の点滅によって示されます。 再度SB3ボタンを押すと、SB4ボタン、SBXNUMXボタンでもパルスノイズフィルターをオフ、オンすることができます。 最後に、SBXNUMX ボタンを XNUMX 回押すと、デバイスはメイン リミット スイッチング モードに戻ります。 すべてのモードで、反射パルス (ある場合) が深度インジケーターに表示され、深さが設定された制限よりも大きい場合、メイン モードでは深度インジケーターの最後の LED (HL26) が点滅します。 選択したモードを記憶するには、SB4 ボタンを約 2 秒間押し続けます。 その後、インジケーターが消え、デバイスは「SLEEP」低電力モードに入ります。 このモードは、SB1 の「リセット」ボタンを押すと終了します。 ただし、動作モードで SB1 を押すと、すべてのパラメータが ROM に記録されている元の状態にリセットされます。 マイクロコントローラーが適切に動作していることを確認したら、プローブパルス発生器のセットアップに進みます。 まず、オシロスコープを使用して、マイクロコントローラーのピン P50 に、持続時間 100 μs、周期 1.0 ms の負のパルスが存在することを確認する必要があります。 次に、オシロスコープをエミッタセンサーに並列に接続し、生成されたプローブパルスを観察します。 それらの振幅は 100 V に達することがあります。少なくとも 40 cm の深さの水が入った容器にエミッターを下げると、反射パルスも観察できます。 L1 コイル トリマーを回転させて、反射パルスの最大振幅に焦点を当てて、ジェネレーターをエミッターの共振周波数に調整する必要があります。 最初のパルスの振幅は 5 ~ 10 V に達することがあります。プロービング パルスの振幅は実質的に周波数に依存しません。 受信機のセットアップは、回路図に示されている直流用のトランジスタモードを設定することから始まります。 この操作は、マイクロコントローラーをソケットから取り外した状態で実行する必要があります。 必要に応じて、トランジスタのベース回路の分圧抵抗を使用してモードを調整できます。 次に、共振回路を発電機の周波数に調整する必要があります。 これを行うには、空中にあるエミッタを障害物から 15 ~ 20 cm の距離に置き、オシロスコープを使用して、コレクタ VT1、VT4、 VT6。 空気中のエミッタの放射パターンは非常に狭いことを考慮する必要があります。 調整するときは、信号のクリッピングを避けるために、VAG の効率を上げるか、障害物までの距離を長くする必要があります。 回路は、要素 R21、C17、C18 の接続点で検出器の後の信号を観察することによって最終的に調整されます。 最後に、オシロスコープをトランジスタ VT9 のコレクタに接続することにより、同調抵抗 R22 がシュミット トリガのトリガしきい値を設定し、最大の感度と誤警報の不在を実現します。 受信感度は約15μVです。 VAG の動作は、受信機コンデンサ C1 の電圧波形を観察することによって制御されます。 必要に応じて、要素 R4 と C1 の値を選択することで変更できます。 超音波エコー測深機を使用して貯留層の深さを測定する理論と実践は、以下の文献に記載されています [2-7]。 文学
著者: I. Khlyupin、ドルゴプルドニ、モスクワ地方
交通騒音がヒナの成長を遅らせる
06.05.2024 ワイヤレススピーカー Samsung ミュージックフレーム HW-LS60D
06.05.2024 光信号を制御および操作する新しい方法
05.05.2024
▪ 涙なしの弓 ▪ Microsoft はタブレットへの Linux のインストールをブロックしています
▪ 記事 彼らはロシアの広大な土地にどのような外国人囚人を住まわせたかったのでしょうか? 詳細な回答 ▪ 記事 インターフェイス 1 線式。 無線エレクトロニクスと電気工学の百科事典 ▪ 記事 自動液晶シャッター付き溶接マスク。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |







 この記事にコメントを残してください:
この記事にコメントを残してください: