|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 トランスミッションインジケーター。 無線エレクトロニクスと電気工学の百科事典
無線電子工学と電気工学の百科事典 / 自動車。 電子デバイス 車のギアボックスに含まれるギアのこのインジケーターの開発と製造の基礎は、S. Gulyaevによる記事「含まれるギアのインジケーター」(「ラジオ」、2010年、第6号、41ページ)で説明されている装置でした。 )。 そのようなポインターが初心者と経験豊富なドライバーの両方に役立つという事実は、そのようなデバイスを作成して車に取り付けたくなるのに十分な理由です。 しかし、提案された記事の著者は、いくつかの新機能を追加することで記事を改善したいと考えていました。 含まれるギアの提案されたインジケーターの特徴は、ダイレクトギアだけでなく、リバースギア、およびパーキングブレーキも含まれることを示すことです。 さらに、場合によってはインジケーターに矢印が表示され、ドライバーにシフトアップまたはシフトダウンを推奨します。 ギアレバーのニュートラル位置用の簡単なセンサーが車に取り付けられている場合、インジケーターもそれについて信号を送ります。 エンジンがかかっていても車が動いていないときは、指針が準アナログのタコメーターに変わります。
ポインタのスキームを図に示します。 1. 私が組み立てたデバイスはVAZ-2110車に取り付けられているため、コネクタX1とX2の位置番号とそれらの接点の番号は、この車の計器クラスタの回路図に対応しています。 ポインタは DD1 マイクロコントローラに基づいており、内部 RC クロック ジェネレータによって駆動されます。 マイクロコントローラ プログラムは作業を開始すると、ポインタ内の目的に従ってポートのピンを入力および出力として設定し、未使用の内部モジュールを無効にします。 次に、速度およびエンジン速度センサー、バックライトスイッチ、パーキングブレーキステータス接触センサー、ニュートラルギアおよびSA1校正モードスイッチの信号が周期的に分析され、ジャンパーS1の存在がチェックされます。 これらの信号の分析結果に基づいて、マトリックス LED インジケータ HG1 上に、含まれる送信およびいくつかの特殊な状況を特徴付けるシンボルの画像が形成されます。 ダイナミックモードではHG1インジケーターに情報が表示されます。 マトリックスの各列に共通の LED アノードを持つインジケーター (TA07-11EWA など) が使用される場合、ジャンパー S1 は存在しないはずです。 同時に、プログラムは、マイクロコントローラーの各出力 RB3 ~ RB7 で、電圧を一定の間隔で交互にハイ論理レベルに設定し、残りの 1 つの出力ではレベルをローに設定します。 これにより、HGXNUMX インジケーターの LED 列の XNUMX つが選択されます。 選択された列のどの LED がオンになるかによって、マイクロコントローラによって出力 RA0 および RA1 を介してシフト レジスタ DD2 にロードされるコードが決まります。 レジスタの出力のローレベルは、カソードによってレジスタに接続されている現在アクティブなマトリックス列の LED がオンであることを意味し、ハイレベルはオフであることを意味します。 設定された時間が経過すると、プログラムは次の列を選択し、その列に指定されたコードをシフト レジスタにロードします。 視覚の慣性により、出力シンボルを形成するすべての LED が同時に点灯しているように見えます。 各列の LED のカソードが共通のインジケーター (TC07-11EWA など) を使用する場合は、ジャンパー S1 を取り付ける必要があります。 この場合、出力 RB3 ~ RB7 のパルスとシフト レジスタ DD2 にロードされたコードはプログラムによって反転されます。これは、このようなインジケーターの動作に必要です。
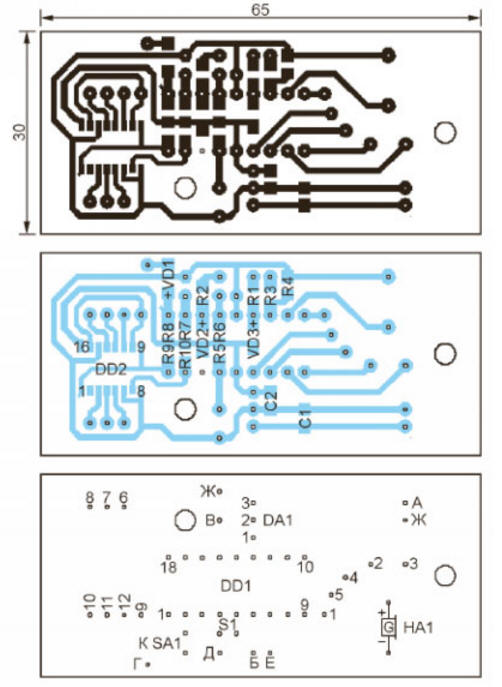
ポインタ部品のほとんどは、図に示すプリント基板上にあります。 およびクエンチング抵抗器 R2 ~ R1 を備えた HG11 インジケータは、図 17 に示す別個の小さなプリント基板上にあります。 3. 基板はワイヤリング ハーネスによって相互接続されており、基板がはんだ付けされる接触パッドの番号は、図の図に示す線番号と両方の基板で一致します。 1. このボードは、サイズ 1206 の表面実装用の抵抗器とコンデンサを取り付けるように設計されています。ダイオード VD1 ~ VD3 およびシフト レジスタ DD2 も表面実装パッケージに入っています。
インジケーターを備えたボードは、ドライバーが読み取り値を観察しやすい場所に配置されます。 メインボードは、車の計器クラスターの後ろにあるラックに取り付けられるか、適切なサイズのケースに入れられます。 インジケーターとインストルメントクラスターとの接続は、取り付けワイヤーの一部を使用して行われます。 車が停止していて、パーキング ブレーキがオンになっている場合 (VD1 ダイオードのカソードに論理的に低い電圧レベルが設定されている場合)、文字 P がインジケーターに表示され、さらにドライバーの注意を引きます。 R の文字は P よりも優先されます。つまり、リバースギアとパーキングブレーキが同時にかかると、R の文字が表示され、ホーンが鳴ります。 パーキングブレーキやリバースギアがかかっておらず、車両が停止している場合、インジケーターは疑似アナログのタコメータースケールに変わります。 点灯する LED の列の高さはエンジン速度に比例します。 速度センサーからのパルス信号は、抵抗 R4 と保護ダイオード VD1 を介して入力 RA2 DD2 に供給されます。 パルスごとに、マイクロコントローラーの内部タイマーの TMR0 レジスタの内容が増加します。 その結果、一定時間内にタイマーによってカウントされるパルスの数は、クランクシャフトの回転数に比例します。 エンジンが停止するとコラムはオフになります。 回転周波数が 1000 min-1 以下の場合、その高さは LED 1000 個分、周波数 2000 ~ 1 min-2000.3000 ~ 1 個の場合、5000 min-1 ~ 5500 個の場合です。 1 min-XNUMX の周波数で最大 XNUMX 個の LED が続きます。 周波数が XNUMX min-XNUMX を超える場合、インジケーター全体が点滅し、エンジンに負荷をかけずに周波数をさらに上げないようドライバーに警告します。 車が走行すると、車速センサからのパルス信号が抵抗R0、保護ダイオードVD1を介して入力RB1 DD3に入力されます。 マイクロコントローラー プログラムは、TMR0 タイマーのオーバーフロー間の時間間隔でこれらのパルスの数をカウントします。これはクランクシャフトの速度に反比例します。 したがって、計算結果は、ギアボックスの出力軸とエンジンのクランクシャフトの回転周波数の比に比例します。 クラッチが完全につながった状態 - ボックスのギア比。 プログラムが含まれるギア (XNUMX 番目から XNUMX 番目まで) について結論を出すための比較に基づく基準値は、マイクロコントローラーの EEPROM に保存されます。 現在のエンジン速度に基づいて、プログラムはギア選択の正しさを分析します。 クランクシャフト速度 3000 min-1 以下で 4000 速と 1 速で移動することをお勧めします。 1400 速と 1 速では、許容周波数は 1,5.2 min-XNUMX に増加し、XNUMX ~ XNUMX 速の最小値は XNUMX min-XNUMX となります。 これらの制限を超えると、数字のインジケーターで、含まれているギアの数字が矢印に置き換えられ、ギアとその方向を変更する必要があることが示されます。 XNUMX秒後、再び付属ギアの番号が表示されます。 クラッチ ペダルを踏んだとき、パルス カウントの結果が利用可能なギアのいずれにも対応しない場合があります。 この状況はインジケーターの文字 C で示されます。 走行中にエンジンが止まってしまうことがあります。 理由はさまざまですが、このような状況では、ブレーキの効率が低下することが最大の危険です。 エンジンを始動する必要があることは、インジケーターの D の文字によって警告されます。 車のギアボックスのギアペアのギア比と、それに取り付けられているエンジンのクランクシャフト速度と運動速度のセンサーの特性がわかれば、噛むギアを決定して入力するための例示的なパルス数を事前に計算することができます。マイクロコントローラーをプログラミングするときに、それらをマイクロコントローラーの EEPROM に書き込みます。 しかし、別の方法もあります。 交通量の少ない、かなり長くて真っ直ぐな道路を選択してください。 エンジン始動後、スイッチSA1を閉じてください。 インジケーターに「K」の文字が表示されたら、1速に入れて発進します。 マイクロコントローラーは速度センサーのパルスをカウントし、XNUMX つの測定結果の算術平均を計算します。 インジケーターには転送番号、つまり最初の転送番号が表示されます。 動きを止めずに XNUMX 速ギアを入れ、インジケーターにその数字が表示されるまで待ちます。 残りのギアも XNUMX 速まで同じ操作を実行します。 その後、結果は自動的に EEPROM に書き込まれます。 ビープ音が鳴ります。 スイッチSAXNUMXを開きます。 ポインタを使用する準備ができました。 シフトレバーニュートラルポジションセンサーは永久磁石とリードスイッチで構成できます。 レバーには磁石が取り付けられており、レバーが中立位置にあるときのみ磁界によって閉じるようにリードスイッチが近くに配置されています。 この場合、インジケーターには N の文字が表示されます。 マイクロコントローラプログラムは、ftp://ftp.radio.ru/pub/2013/08/indvkp.zipからダウンロードできます。 著者: S. カシュティン
庭の花の間引き機
02.05.2024 最先端の赤外線顕微鏡
02.05.2024 昆虫用エアトラップ
01.05.2024
▪ ISL43640 - 4:1 マルチプレクサ/デマルチプレクサ ▪ 超高速 Samsung PM1725 および PM1633 SSD
▪ 記事 イギリスから来たニワトリが、差し迫った世界の終わりについてどのようにパニックを引き起こしたのでしょうか? 詳細な回答 ▪ 記事 クヴァソヴァニーシープスキン。 簡単なレシピとヒント ▪ 記事現代の真空管超音波周波数の設計の特徴。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |



 この記事にコメントを残してください:
この記事にコメントを残してください: