|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
テクノロジーの歴史、テクノロジー、私たちの周りのオブジェクト
蒸気機関。 発明と生産の歴史
ディレクトリ / テクノロジーの歴史、テクノロジー、私たちの周りのオブジェクト 蒸気エンジンは、水蒸気のエネルギーをピストンの往復運動という機械的仕事に変換し、その後シャフトの回転運動に変換する外燃熱機関です。 広い意味では、蒸気エンジンは蒸気エネルギーを機械的仕事に変換する外燃機関です。 最初の蒸気エンジンは 1705 世紀に作られました。 Papen は、蒸気の作用によって上昇し、排気蒸気が濃くなった後の大気の圧力によって下降するピストンを備えたシリンダーを表現しました。 同じ原理に基づいて、セイバリーとニューコメンの蒸気エンジンは、鉱山から水を汲み出すために 1769 年に建設されました。 蒸気エンジンの最終改良は XNUMX 年にワット (ワット) によって行われました。
XNUMX 世紀後半まで、人々は主に水上エンジンを生産のニーズに使用していました。 水車から機械の動きを遠くに伝えることは不可能であるため、すべての工場を川岸に建設する必要があり、必ずしも便利ではありませんでした。 さらに、このようなエンジンを効率的に運用するには、費用のかかる準備作業(池の開発、ダムの建設など)が必要になることがよくありました。 水車には他にも欠点がありました。動力が弱く、仕事が季節に左右され、調整が困難でした。 徐々に、根本的に新しいエンジンの必要性が強く感じられるようになりました。強力で、安価で、自律的で、簡単に制御できます。 蒸気機関は、一世紀にわたってそのような機関になりました。 蒸気エンジンのアイデアは、古くから知られている往復ウォーターポンプの設計によって発明者に部分的に提案されました。 その動作原理は非常に単純で、ピストンが上がると、シリンダーの底にあるバルブから水がシリンダーに吸い込まれます。 シリンダーと揚水管を接続する側弁は、このパイプからの水がシリンダーの内部にも入る傾向があり、それによってこのバルブを閉じたので、その時点で閉じられました。 ピストンが下がると、シリンダー内の水に圧力がかかり始め、それにより下のバルブが閉じ、サイドバルブが開きました。 このとき、シリンダーからの水はライザー管を上って供給された。 ピストン ポンプでは、外部から受け取った仕事は、ポンプ シリンダーを通る流体の移動に費やされました。 蒸気機関の発明者は、同じ設計を使用しようとしましたが、反対方向にのみ使用しました。 ピストン シリンダーは、すべての蒸気ピストン エンジンの基礎です。
しかし、最初の蒸気エンジンは、深い鉱山から水を汲み上げるために使用される蒸気ポンプほどのエンジンではありませんでした。 それらの動作原理は、冷却して水に凝縮した後、蒸気が占めるスペースが加熱された状態の170分のXNUMXであるという事実に基づいていました。 加熱した蒸気で容器から空気を追い出し、容器を閉じてから蒸気を冷却すると、容器内の圧力は外部よりもはるかに低くなります。 外部の大気圧はそのような容器を圧縮し、ピストンがその中に配置されている場合、ピストンはより大きな力で内側に移動し、その面積が大きくなります. このような機械のモデルは、1690 年に Papin によって初めて提案されました。 1702 年に、彼は独自の Severi ポンプを作成しました。 しかし、1711 世紀前半に最も広く使用されたのは、XNUMX 年に作成されたニューコメン蒸気エンジンでした。
蒸気シリンダーはニューコメンの蒸気ボイラーの上に設置された。 ピストン ロッド (ピストンに接続されているロッド) は、柔軟な接続によってバランス バーの端に接続されていました。 ポンプロッドはバランサーのもう一方の端に接続されていました。 バランスバーの反対側の端に取り付けられたカウンターウェイトの作用で、ピストンが最上部の位置まで上昇しました。 また、ピストンの上方への動きは、その際にシリンダー内に放出される蒸気によってアシストされました。 ピストンが最も高い位置にあるとき、バルブが閉じられ、ボイラーからの蒸気がシリンダーに流入し、水がシリンダーに噴霧されました。 この水の作用により、シリンダー内の蒸気が急速に冷却され、凝縮し、シリンダー内の圧力が低下しました。 シリンダー内とシリンダー外で発生した圧力差により、大気圧の力がピストンを下に動かし、有用な仕事を行いました - それはバランサーを動かし、それがポンプロッドを動かしました。 したがって、有用な作業は、ピストンが下がったときにのみ実行されました。 その後、蒸気が再びシリンダーに発射されました。 ピストンが再び上昇し、シリンダー全体が蒸気で満たされました。 水が再び飛散すると、蒸気が再び凝縮し、その後、ピストンは別の有用な下向きの動きを行いました。 実際、ニューコメンの機械では、大気圧が働き、蒸気は希薄な空間を作り出すだけでした。
蒸気エンジンのさらなる発展に照らして、ニューコメンの機械の主な欠点が明らかになりました-その中の作動シリンダーは同時にコンデンサーでした。 このため、シリンダーを冷却してから加熱することを交互に行う必要があり、燃料消費量が非常に多くなることが判明しました。 車に50頭の馬がいて、必要な燃料を配達する時間がほとんどない場合がありました。 このマシンの成績係数 (COP) は、ほとんど 1% を超えませんでした。 言い換えれば、すべての熱エネルギーの 99% が無益に浪費されたということです。 それにもかかわらず、この機械はイギリス、特に石炭が安かった鉱山で広く普及していました。 後続の発明者は、ニューコメン ポンプにいくつかの改良を加えました。 特に、1718 年に、ベイトンは自動的に蒸気をオンまたはオフにし、水を入れる自動分配メカニズムを思いつきました。 彼はまた、蒸気ボイラーに安全弁を追加しました。 しかし、ニューコメンのマシンのコンセプトは、グラスゴー大学の機械工であるジェームズ ワットが改良に着手するまで、50 年間変わっていませんでした。 1763 年から 1764 年にかけて、彼は大学が所有していたニューコメンの機械のサンプルを修理しなければなりませんでした。 ワットはそれの小さなモデルを作り、その動作を研究し始めました。 同時に、彼は大学に属するいくつかの楽器を使用することができ、教授のアドバイスを利用しました. これらすべてにより、彼は問題を見る前の多くの力学よりも広く問題を見ることができ、はるかに高度な蒸気エンジンを作成することができました.
このモデルを使って、ワットは、蒸気が冷却されたシリンダーに投入されると、その壁でかなりの量が凝縮することを発見しました。 エンジンをより経済的に運転するには、シリンダーを常に加熱しておく方が適切であることがすぐにワットに明らかになりました。 しかし、この場合、蒸気を凝縮するにはどうすればよいでしょうか。 数週間、彼はこの問題を解決する方法を熟考し、最終的に、蒸気の冷却はメインの短いチューブに接続された別のシリンダーで行う必要があることに気付きました。 ワット自身は、夜の散歩中に洗濯物のそばを通りかかったことがあり、窓から蒸気の雲が漏れているのを見て、弾性体である蒸気が希薄な空間に突入するはずだと推測したことを思い出しました。 ちょうどその時、ニューコメンの機械に蒸気凝縮用の別の容器を追加するべきだという考えが彼に浮かびました。 機械自体によって駆動される単純なポンプは、凝縮器から空気と水を除去できるため、機械の各ストロークでそこに排出スペースを作成できます。
その後、ワットはさらにいくつかの改良を加えた結果、マシンは次のような形になりました。 チューブはシリンダーの両側に接続されていました。下のチューブから蒸気ボイラーから蒸気が入り、上のチューブから凝縮器に排出されました。 凝縮器は、垂直に立っている XNUMX つのブリキの管で構成され、タップで穴が塞がれた短い水平管によって上部で互いに接続されていました。 これらのチューブの底は、空気出口ポンプとして機能する XNUMX 番目の垂直チューブに接続されていました。 冷蔵庫と空気ポンプを構成するチューブは、冷たい水の入った小さなシリンダーに入れられました。 蒸気管はボイラーに接続され、そこから蒸気がシリンダーに放出されました。 蒸気がシリンダーを満たすと、蒸気バルブが閉じられ、凝縮器の空気ポンプのピストンが上昇しました。 蒸気がチューブに突入してそこで凝縮し、ピストンが上昇し、負荷を引きずりました(これがピストンの有用な仕事を測定した方法です)。 その後、出口コックを閉めた。 1768 年、このモデルに基づいて、ワットの大型機械が鉱山労働者 Rebuk の鉱山で製造され、この発明により 1769 年に最初の特許を取得しました。 彼の発明で最も基本的かつ重要なのは、蒸気シリンダーと凝縮器の分離でした。これにより、シリンダーの絶え間ない加熱にエネルギーが費やされませんでした。 車はより経済的になりました。 その効率が向上しました。 その後数年間、ワットはエンジンの改良に懸命に取り組みました。 同時に、彼は経済的にも技術的にも多くの困難を克服しなければなりませんでした。 彼は、彼にお金を提供した金属加工工場の所有者であるボルトンと一緒に会社に入りました。 他にも問題がありました。エンジンには、部品同士の気密性と正確な取り付けが必要でした。 ピストンとシリンダーは、蒸気が逃げるのを防ぐために完璧なサイズにする必要がありました。 このような精度は、当時の機械工学にとって新しいものであり、必要な精密機械さえありませんでした。 大径シリンダーのアンダーカットは、ほとんど解決できない問題のようでした。 その結果、ワットの最初の機械は不満足に作動した: シリンダーから蒸気が漏れ、凝縮器がうまく機能せず、ピストンロッドが動く穴から蒸気が口笛を吹き、ピストンとシリンダーの壁の間から漏れた。 ボーリングシリンダー用の特別な機械を作成する必要がありました。 (一般に、蒸気エンジンの作成は、工作機械製造における真の革命の始まりを示しました-蒸気エンジンの製造を習得するために、機械工学は質的により高いレベルに上昇しなければなりませんでした。)最後に、すべての困難が克服されました。 、そして1776年から蒸気機関の工場生産が始まりました。 1776 の設計と比較して、1765 のマシンにはいくつかの基本的な改良が加えられました。 ピストンは、蒸気ジャケット (ジャケット) に囲まれたシリンダー内に配置されました。 その結果、熱損失が最小限に抑えられました。 シリンダーが開いている間、ケーシングは上から閉じられていました。 蒸気はボイラーからサイドパイプを通ってシリンダーに入りました。 シリンダーは、蒸気出口バルブを備えたパイプによってコンデンサーに接続されていました。 このバルブの少し上、シリンダーの近くに、XNUMX つ目のバランス調整バルブが配置されました。 両方のバルブが開いていると、ボイラーから放出された蒸気がピストンの上下のすべての空間を満たし、空気がパイプを通って凝縮器に流れ込みます。 バルブが閉じられたとき、システム全体が平衡状態を保ち続けました。 次に、下部の出口バルブが開かれ、ピストンの下のスペースが凝縮器から分離されました。 この空間からの蒸気は凝縮器に送られ、ここで冷却されて凝縮されます。 この場合、ピストンの下に希薄な空間ができ、圧力が下がります。 上から、ボイラーから来る蒸気は圧力を加え続けました。 その作用の下で、ピストンは下降して有用な仕事をし、それはバランサーの助けを借りてポンプロッドに移されました。 ピストンが最も低い位置まで下がった後、上部のバランス バルブが開きました。 蒸気は再びピストンの上下の空間を満たしました。 シリンダー内の圧力はバランスが取れていました。 バランスバーの端にあるカウンターウェイトの作用により、ピストンは自由に上昇しました(有用な作業は行われませんでした)。 その後、プロセス全体が同じ順序で続行されました。 このワットの機械はニューコメンのエンジンのように一方通行のままであったが、すでに重要な違いがあった - もしニューコメンの仕事が大気圧で行われたなら、蒸気はワットのためにそれを行った. 蒸気圧を上げることで、エンジンの出力を上げ、その動作に影響を与えることができました。 ただし、これはこのタイプの機械の主な欠点を排除するものではありませんでした-それらは1775つの動作動作しか行わず、ジャークで動作するため、ポンプとしてのみ使用できました。 1785 年から 66 年の間に、これらの蒸気エンジンが XNUMX 基製造されました。 蒸気エンジンが他の機械に動力を供給することができるためには、それが均一な円運動を作り出すことが必要でした。 このような機械の根本的な違いは、ピストンが1782つの動作動作(前方と後方の両方)を行わなければならないことでした。 このような複動式エンジンは、XNUMX年にワットによって開発されました。 ここでの蒸気は、最初にピストンの片側から放出され、次にピストンの反対側から放出され、蒸気入口の反対側のスペースは毎回復水器に接続されていました。 この問題は、スプールの助けを借りて開閉する独創的な出口パイプのシステムの助けを借りて解決されました。
スプールは、蒸気を通すために XNUMX つの穴の前で動くバルブでした。 バルブが片側または反対側にストロークするたびに、XNUMXつの穴が開き、別の穴が閉じた結果、蒸気が通過できる経路が変化しました。 スプールの動きは、それぞれの極限位置で複雑な性質を持っており、一方の穴が開いてもう一方の穴が閉じているとき、蒸気の一部を飛ばして中間位置をできるだけ早く通過するために、しばらく停止する必要がありました。可能。 スプールの動きは、シャフトにある特別なメカニズムによって制御されました。 その中の主要部分は風変わりでした。
ワットによって発明されたエキセントリックは、このプレートの中心ではなく、そこから少し離れた位置にある軸上にある特別な形状のプレートで構成されていました。 この取り付けでは、車軸の片側に、反対側よりも多くのプレートがありました。 プレート自体はリングで囲まれており、スプールを動かすためにロッドが取り付けられていました。 プレートが回転している間、その丸みは常にリングの表面の内側の新しい点に押し付けられ、幅の広い側でそれを動かします。 シャフトが XNUMX 回転するたびに、スプールが XNUMX 回ストロークします。 リングの回転の性質(およびそれに応じたスラストの動き)は、偏心輪に挿入されたプレートの形状に依存していました。 計算により、XNUMX回転中にスプールの加速、減速、または停止のいずれかを引き起こすようなフォームが選択されました。 この装置の導入により、ワットは機械の操作を完全に自動化しました。 最初は、蒸気の供給を調整する任務を負っていた作業員がエンジンの動作を監視していました。 エンジンが高速になりすぎると、特殊なダンパーで蒸気分配管を塞ぎ、蒸気圧力を下げました。 次に、この機能は、次のように配置された特別な遠心レギュレーターに割り当てられました。 作動軸の動きはレギュレータープーリーに伝達されました。 後者の回転が速すぎると(したがって、エンジン速度が過度に上昇します)、遠心力の作用でレギュレーターボールが上昇し、バルブスリーブと蒸気の量を制限するレバーを動かしました。 回転数の低下に伴い、ボールが落下し、バルブがわずかに開きました。
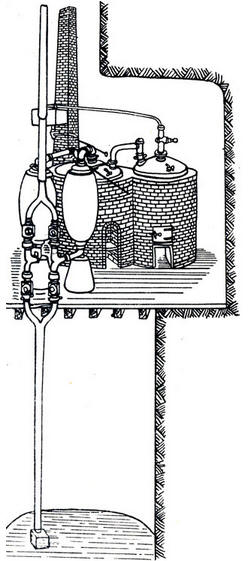
これらすべてのデバイスの動作を考えると、マシンの一般的な原理を想像するのは簡単です。 蒸気ボイラーから蒸気はパイプを通って空間bに入り、そこからスプールの動きにより、ピストンBの上または下のシリンダーに向けられました。 蒸気がピストンの上の空間に入ると、ピストンは下降し、ピストンの下に入ると上昇しました。 蒸気管には、必要に応じて多かれ少なかれ蒸気を通過させるバルブがありました。 バルブの位置は、蒸気遠心調速機fによって調整されました。 偏心eがメインシャフトに座り、そのロッドが機械の反対側のスプールボックスの下を通過し、レバーを使用してスプールを上下させました。 ピストンBの動きはロッドOに伝達され、ロッドOはシリンダーヘッドに完全にしっかりと通過し、そこから可動ロッカーに伝達されました。 ロッカーの反対側の端には、メインシャフトKのクランクを下から捉えたパーツGがありました。したがって、ピストンが上昇および下降するたびに、このシャフトがXNUMX回転し、フライホイールLがその上に配置されました。力は、使用されるはずのベルトまたはその他の手段を使用して主軸から伝達されました。 コンデンサーは機械の底にありました。 それは、ポンプqによって絶えず更新される水で満たされたタンクと凝縮が起こったタンクDで構成されていました。 冷水はタンクを取り囲むだけでなく、多くの小さな穴からタンクに飛び散りました。 排水された温水は、ウォーターポンプCの助けを借りて絶えず汲み出されました。温水はボックスに入り、ポンプMmの助けを借りて再び蒸気ボイラーに汲み出されました。
ピストンからシャフトに運動を伝達する機構の作成には、ワットの多大な努力が必要でした。 彼が解決した課題の多くは、一般的に当時の技術的可能性の限界にありました。 問題の XNUMX つは、必要な締め付けを作成することでした。 複動式シリンダーでは、単動式シリンダーとは異なり、両側をしっかりと閉じる必要がありました。 しかし、ピストンは外部部品と接続する必要があったため、カバーに丸い穴が残り、ピストンロッド(ロッド)が完全にしっかりと入りました。 ワットは、油を塗ったトウのしっかりとねじ込まれた厚い層をふたに入れるというアイデアを思いつきました。これに沿って、ロッドはシリンダーの金属に触れることなく滑りました。 さらに、ロッドは滑らかであるため、ほとんどこすれませんでした。 もう XNUMX つの問題は、運動変換機構自体にありました。結局のところ、ピストンが上昇するときにピストンによって行われた有効な仕事を伝達するために、ピストン ロッドをバランス バーにしっかりと接続する必要がありました。 以前のすべての蒸気エンジンでは、それらはチェーンで接続されていました。 ここで、直線的に動くロッドと円弧に沿って動くバランサーの端をどのようにしっかりと接続するかを考えなければなりませんでした。 ワットは、ワットの平行四辺形と呼ばれる特別な送信装置を作成することでこれを実現しました。
ロッカー アーム A の端部は、リンク機構 ADB によって連結され、レバー BC の B 点が C 点でエンジンの固定部分に接続されています。 したがって、システム全体にはXNUMXつの回転固定点がありました。バランスバーが振動するバランスバーの中心と、レバーCBが回転する点Cです。 バランスバーの端の点 A とレバーの端の点 B CB は、バランスバーの中心と点 C から描かれた円弧に沿って移動しました。 Bは、垂直と直線に非常に近い動きをしました。 この点はピストンロッドに接続されていました。 その後、ワットは、直線運動を結ぶ XNUMX つの点を取得することで、この伝達装置を改良しました。 彼はそれらのXNUMXつをピストンロッドに接続し、もうXNUMXつをエンジンに供給する補助ポンプのロッドに接続しました。 この送信装置の作成には、ワットが自分の最大の発明と考えるほどの多大な努力が必要でした。 彼は次のように書いています。
次に、バランスバーの振動運動はクランクの助けを借りて回転運動に変換されました(クランク機構はピカードによって特許が取得されたため、ワットの最初の機械では、バランスバーの振動運動は太陽惑星を使用して回転運動に変換されましたピカードの特許が切れるとすぐに、ワットによって作成されたメカニズムは、クランクトランスミッションを使用し始めました)。 これらすべての変換の結果として得られた作業シャフトの回転運動のおかげで、新しいワット エンジンは他の作業機械を駆動するのに適していました。 これにより、彼は大規模な機械産業の発展において革命的な役割を果たすことができました。 1785 年から 1795 年の間に 144 基の蒸気エンジンが製造され、 1800 年までに 321 ワットの蒸気エンジンがすでにイングランドで稼働していた。 それらは文字通りすべての生産分野で使用されました。 ワットの偉大な業績は、同時代の人々や子孫から正当に評価されました。 1819 年に発明者が亡くなった後、英国議会はウェストミンスター寺院に大理石の記念碑を建設して彼の記憶を称えました。 著者:Ryzhov K.V.
▪ ムーンローバー ▪ 原子力発電所 ▪ 合成繊維
タッチエミュレーション用人工皮革
15.04.2024 Petgugu グローバル猫砂
15.04.2024 思いやりのある男性の魅力
14.04.2024
▪ コンパクトシステム向けCPUクーラー Phanteks PH-TC12LS RGB
▪ サイトの「無線エレクトロニクスと電気工学の百科事典」セクション。 記事の選択 ▪ 記事 ユング・リチャード・パーカーは文学の同名人物の悲しい運命をどのように繰り返したのか? 詳細な回答 ▪ 記事 iButton キーとショック センサーを備えたセキュリティ デバイス。 無線エレクトロニクスと電気工学の百科事典 ▪ Motorola サービス カード エミュレータの記事。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |













 他の記事も見る セクション
他の記事も見る セクション 