|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 レーザーポインター付きの半自動ボール盤です。 無線エレクトロニクスと電気工学の百科事典
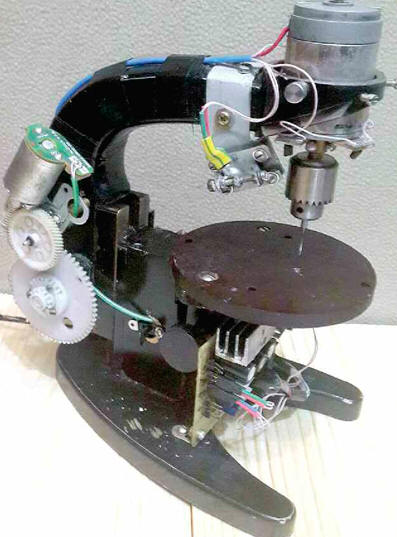
プリント基板に穴を開けるために、多くのアマチュア無線家はいわゆるマイクロドリルを使用します。これは、シャフトにドリルコレットクランプが取り付けられた小型の DC 電気モーターです。 プリント基板を加工するためのツールとして、マイクロドリルは理想からは程遠いです。パンチを使わずに将来の穴の中心に正確に入るのは非常に難しく、手でマイクロドリルの正確な垂直位置を達成することはほとんど不可能です。 その結果、低品質の「斜め」穴ができ、その中心がボードの反対側にずれたり、ドリルが壊れたりすることもあります(非常に壊れやすい高価な超硬ドリルは特に簡単に折れてしまいます)。材料)。 市場にはボール盤のオプションが多数ありますが、それらはすべて手動ドリル送りと大きなバックラッシュを備えており、ボール盤に含まれる電子的な「サポート」は電源と駆動モーターの速度安定装置のみです。 この記事で説明されている自家製ボール盤を使用すると、事前にコアパンチを行わずに穴を開けることができます。 その動作ロジックはマイクロコントローラーによって制御されます。 この機械での作業では、高価な超硬ドリルが壊れることはありません。 このようなドリルの使用のおかげで、穴の品質が向上します。ドリルは文字通り穴を切るため、穴あけ後に箔を研磨する必要がなく、印刷された導体の薄い箔がさらに薄くなります。 1500 つの超硬ドリルビット (ドイツ製) を使用して、この機械で 10 以上の穴を開けましたが、まだ壊れず、高品質の穴を開け続けています。 安価なドリルは、通常、ホイル付きグラスファイバーに 20 ~ XNUMX 個の穴をあけると穴あけが終了します。そのため、ドリルの回転速度を上げ、穴あけ時の圧力を高める必要があります。その結果、穴の周囲にホイルのロールが形成され、穴あけ後に徹底的な穴が開けられます。導体の研磨が必要です。 本装置(外観図は図1-3に左、右、奥)は、LOMO協会が製造した国産顕微鏡MBI-3をベースに製作しています。 その動作は制御ユニット (CU) によって制御されます。その図を図に示します。 4. ATtiny45 マイクロコントローラー [1] に基づいています。 電力が印加されると、制御ユニットは機械を初期位置に設定します。つまり、可動部分が下部または中間位置にあった場合、機械は自動的に初期上部位置まで上昇します。 次に、加工中の基板をレーザー ビームの下に置き (レーザー ビームが穴の中心に確実に当たるようにします)、手で作業テーブルに押しつけ、ペダルを踏みます。 この場合、制御装置は、ドリル付きチャックを駆動する電動モータおよびドリル送りモータに電力を供給する。 穴あけが終了すると、ドリル送りモーターが機械を元の状態に戻し、制御ユニットが両方のモーターの電源をオフにします。 機械は次の穴を開ける準備ができています。
子供向け玩具に使用されているレーザーモジュールを改造してレーザーポインターとして使用しています。 レーザーコリメータの焦点を短距離に合わせ、供給電流を制限する必要があります。供給電流は、レーザーがちょうど輝き始める程度にする必要があります。 これにより、より細いビームを得ることができ (私はなんとか直径 0,2 mm を達成できました)、レーザー放射を安全なレベルまで減らすことができます。 レーザー取り付けアセンブリのアセンブリを図に示します。 図5にその部分の図面を示す。 5. ベース 6 とレーザー ホルダー 3 は、厚さ約 4 mm の鋼板でできています (古い CD-ROM ケースの壁を使用しました)。 ワークピースに必要な穴を開けたら、ホルダー 1 の長方形の花びらを直角に曲げて、ネジをレーザーモジュールに取り付けます。 モジュールを分解し、真鍮本体のはんだ付け部分と 4 つの M3 ナットを錫メッキします。 ねじ 4 (M5x3) をホルダー 28 の曲がった花びらの穴に挿入し、両方のナット 8 をホルダーの目の間にあるようにねじ込みます (図 5 を参照)。 レーザー本体 2 はネジ 5 (ナット 8 の間) の下に挿入され、ホルダーにぴったりとフィットするようにナットがそれにはんだ付けされます (これは、調整プロセス中にネジが回転するときにレーザーがバックラッシュなく動作するために必要です) 。
次に、さらに 5 つのナット 1 をネジ 4 の突出端にねじ込み (そのうちの 5 つはロックナットになります)、ホルダー XNUMX の穴によってネジ XNUMX が軸に沿って動かないように締めます。 。 ここで、ネジを時計回りと反対方向に回転すると、レーザー モジュールが一方の目からもう一方の目に移動します。 レーザーを備えたホルダーをベース 3 に取り付けるには、2 つのナットを裏側でベース 7 にはんだ付けします (図 3 ではっきりと見えます)。 次に、頭の下にワッシャー15が付いた6本のネジXNUMX(MXNUMXxXNUMX)をレーザー側からホルダーの対応する穴に挿入し、その上に円筒形の圧縮バネを置き、その後、ベースに半田付けされたナットにねじ込みます。 これで、ネジを使用してレーザーの位置をさまざまな方向に調整できるようになります。 組み立てられた構造をチューブホルダー (顕微鏡の上部) 上で試し、レーザーホルダーのベースのシャンクをその周りで曲げ、鋭いスクライバーを使用してベースの穴の輪郭をチューブに転写します。ホルダーに直径 2,5、深さ 10 mm の 3 つの穴を開け、M3 ネジを切り込みます。 最後に、レーザー ホルダーのベースを MXNUMX ネジで顕微鏡に固定します。 ドリルに送り込むには、ビデオデッキのウォームギアを備えた電動モーターが使用されました(かなり前に分解したため、名前はわかりません)。 この機構 (図 7) は、内外の M4 ネジと同数の M4 ネジを備えた 2,5 つの金属スタンドを使用して顕微鏡鏡筒ホルダーに固定されています。 ギアは XNUMX つの MXNUMX ネジとナットを使用して顕微鏡ハンドルに固定されており、両方の部品の穴は貫通しています。 組み立ての際は注意が必要です。ギアとハンドルの位置のずれは最小限に抑えてください。
送り速度はトリミング抵抗 R11 によって制御されます。 使用される電気モーターは低出力(定格電圧 - 6 V、電流 - 30 mA)ですが、ウォームギアボックスのおかげで、そのタスクに非常にうまく対処します。 ギアボックスの設計は任意ですが、顕微鏡ハンドルを簡単に回転させるのに十分な力を提供する必要があります。 ステッピングモーターを使用できます。 最初のプロジェクトではそのようにしましたが、既存のステッピング モーターではシャフトのトルクが不十分で、適切なステッピング モーターを見つけることができませんでした。 ステッピングモーターの使用に興味がある人は、編集者を通じて私に連絡してください。 プロジェクトファイルは保存されています。 ATmega8マイクロコントローラーを使用しました。 複合トランジスタ VT5VT6 のキーはドリル送りモーターのオンとオフを切り替え (XP6 プラグに接続されています)、トランジスタ VT2 とリレー K1 はその方向 (上下) を制御します。 複合トランジスタ VT3VT4 のキーはドリル ドライブの電気モーターを制御し (XP3 プラグに接続されています)、速度安定装置は DA1 マイクロ回路と VT1 トランジスタに組み込まれ、周波数は調整抵抗 R1 によって調整されます。 たとえば、[2] で提案されているような、より複雑な回転速度スタビライザーを使用することに意味はありません。なぜなら、「目で」穴の中心にドリルを「狙う」必要がないからです。 この問題に関して実験が行われました。 DA6 チップには、ドリル送りモーター用の電源電圧安定化装置が含まれています [3]。 直列に接続された統合スタビライザー DA2 と DA5 は、それぞれ 12 V と 5 V の安定化電圧を得るように設計されています。最初のスタビライザーは DA3、DA4 マイクロ回路上の電流スタビライザーに電力を供給するために使用され、2 番目はマイクロコントローラーとVT2 トランジスタのスイッチをオンにします。 コンデンサ C3、C6、CXNUMX はフィルタリングし、残りはブロックします。 本機はLED照明を使用しています。 バックライト電流とレーザー電流は安定化されます。レーザー電流スタビライザーは DA3 チップに組み込まれ、バックライト LED は DA4 チップに組み込まれます。 安定化電流は、式 I = 1,25/R [3] を使用して計算され、抵抗 R13 および R14 を選択することによって設定されます。 安定した電流のおかげで、同じタイプの複数のバックライト LED を直列に接続することができます。 レーザーは XP4 プラグに接続され、LED は XP5 に接続されます。 XP7 コネクタはプログラマの接続を目的としています。 接点の用途は「TRITON+ V5.7T USB」プログラマ[4]に対応します。 マイクロコントローラー プログラムは、統合環境 Code VisionAVR V2.05 [5、6] で開発されました。 XP2コネクタにはドリルの上下端の2位置センサーと穴あけスタートボタンが接続されています。 後者は接点 4 と 1、上部の位置センサーは接点 4 と 3、下部の位置センサーは接点 4 と 1 に接続されています。センサーとボタンには常開接点があり、トリガーされると共通に接続されます。ワイヤー。 ペダルに取り付けられたリミットスイッチをボタンとして使用します。 位置センサーは音楽センターの DVD プレーヤーから使用されます。 低い位置でのセンサーのトリガーは、ドリルが処理中の基板の下に 20 mm 以下に落ちないように調整されます。 上部の位置センサーはドリルの最大ストロークを規制するもので、3mm以上にしても意味がありません。 調整は、ブラケット 8 のネジ 6 (M3) で固定された弾性ワイヤ 5 (図 6) で作られたスタンドを移動することによって行われます。ネジは、ブラケットのスロットを通ってネジ山付きの長方形のプレートにねじ込まれています。ストップを上下に移動します。 標準ナットではなく、ねじ付きプレートを使用することで、ねじ 4 を締めるときにナットが回転しないように、工具を使用せずにポストの位置を見つけた位置に固定できます。プレートはナットにはんだ付けできます。 ブラケットはネジ 2 でチューブ ホルダーに固定され、センサー 5 は顕微鏡のベースにネジ止めされた L 字型ブラケットに固定されます。 ブラケット9の図を図に示します。 図9に示すように、それは、レーザーホルダー部品と同様に、鋼板で作られている。
マシンの電源電圧は、使用するドリル駆動モーターによって異なりますが、14 V を下回ってはなりません。私は、定格電源電圧が 24 V の Canon インクジェット プリンタのプリント ヘッド移動モーターを使用しました。マシンの電源電圧は、 30 V の調整マージンで選択されます。電流消費量は、定常状態 (穴あけ) でのデバイス全体で 1,5 A ですが、エンジンが始動した瞬間に一時的に 3 A に増加します。 したがって、電源は少なくとも 30 A の消費電流で 3 V の出力電圧を提供する必要があります。私は、0 ~ 50 V、0 ~ 10 A の線形安定器を備えた自家製スイッチング実験室用電源を使用しています。 電流制限によりモーターがスムーズに始動します。 制御ユニットの部品は、図に示す図面に従って作成された、片面箔コーティングされたグラスファイバー製のプリント回路基板に取り付けられています。 10. 印刷された導体のパターンは、フォトネガからの画像をフォトレジストでコーティングされたワークピースフォイルに露光することによって適用されます。 ネガ フォトマスクは、インクジェット プリンタで最高の品質で印刷できます。
固定抵抗器 R3、R7 ~ R9、R15、セラミック コンデンサ C1、C4、C5、C7 (すべてサイズ 0805 表面実装用)、およびマイクロコントローラ DD1 (SOIC8 パッケージ内) は、プリント導体に直接はんだ付けされます。 残りの抵抗はMLT-0,25、コンデンサは輸入酸化物です。 トランジスタ VT1、VT4、VT6 - 任意のシリーズ KT805、KT819、VT3、VT5 - VS337、VS547、2N2222、シリーズ KT315、KT3102。 VT2 - BC337、2N2222、KT630、KT815、KT972シリーズのいずれか(コレクタ電流の最大値がリレーK1の動作電流以上である必要があります)。 VT5VT6 キーとしては、KT829 または KT972 シリーズの 3 つのトランジスタを使用でき、VT4VT827 キーには、任意の文字インデックスを持つ 829 つの KTXNUMX または KTXNUMX トランジスタを使用できます。 リレー K1 - R40-11D2-5/6 は、動作電圧が 5 V で、スイッチング電流が少なくとも 1 A になるように設計された 12 つのスイッチング接点を備えたリレーと交換できます。接続することで 1 V リレーを使用できます。 (図によると) 上部の端子は、その巻線 (ダイオード VD3 とともに) を DA2 チップの出力 (ピン XNUMX) に接続します。 制御基板はステージの下に設置され、顕微鏡の底面の角を通ってM3ネジで固定されます(図1参照)。 チップ DA2 と DA5 はヒートシンクに取り付けられています。 トランジスタ VT1 にヒートシンクを装備することをお勧めします。 テーブルはテキストライト製です。 ボール盤に変換する前に、顕微鏡を分解し、チューブホルダー (顕微鏡の上部) の動きを妨げる粘性のある潤滑剤を完全に洗い流し、液体潤滑剤などで潤滑する必要があります。 、変圧器油。 上部の動きはできるだけ軽く、滑らかで、遊びがないことが必要です。 ドリルを固定するための古典的なコレットの使用を放棄することが決定されました。 モールステーパーと三爪チャックは直径0,3~4,5mmのドリルに使用されます。 モーターとカートリッジ間の接続はスムーズでなければなりません。 加工中の基板上のレーザー ポイントは、次の順序でネジを使用して調整されます。基板の材料と同様のフォイル グラスファイバー プレートに穴が開けられ、調整ツールを使用してレーザー ポイントが穴に正確に調整されます。ホルダーのネジ。 この場合、プレートが動かないようにする必要があります。 私の経験では、レーザードットが消えた(フォイルから反射されなくなった)場合、レーザービームは穴に入り、調整されました。 ガラス繊維ラミネートの厚さは、製造される基板の厚さと同じである必要があります。 この後、レーザーが将来の穴の中心を正確に示すことを確認できます。 保守可能な部品とエラーのない取り付けにより、コントロールユニットを調整する必要はありません。 機械は50年以上稼働しています。 稼働中は両手が空くので作業が便利です。 私はボードを頻繁に作っていますが、ドリルを XNUMX つも壊したことがありません。これまでこの機械なしでどうやってやっていたのか想像できません。 今では自信を持って高品質の高価なドリルを購入しています。 XNUMX 個の穴を開けるのに XNUMX 分もかかりません。 ただし注意が必要で、機械の作業台にボードを設置する際に、誤ってドリルに当たったりして、壊れやすいドリルが折れてしまう危険性があります。 もちろん、その間にボードを移動しない限り、穴あけ中にドリルが破損する可能性は低くなります。 マイクロコントローラー プログラムと、印刷導体のパターンをプリント基板ブランクに転写するための .pdf 形式のネガおよびポジ写真テンプレートをダウンロードできます。 ftp://ftp.radio.ru/pub/2015/07/stanok.zip から. 文学
著者:I。パルシン
タッチエミュレーション用人工皮革
15.04.2024 Petgugu グローバル猫砂
15.04.2024 思いやりのある男性の魅力
14.04.2024
▪ 宇宙から地上受信機へのエネルギーの直接伝送のためのソーラーパネルサンドイッチ ▪ Transcend TS128GMTS810 ソリッド ステート ドライブ ▪ 水小惑星発見 ▪ Lenovo IdeaPad ゲーミング Chromebook
▪ アマチュア無線デザイナー向けのサイトのセクション。 記事の選択 ▪ ゲオルグ・クリストフ・リヒテンベルグによる記事。 有名な格言 ▪ 記事 そのスラング名と完全に矛盾する航空機デバイスはどれですか? 詳細な回答 ▪ 記事 主電源電圧安定化装置 LPS-2500RV の改良。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |










 この記事にコメントを残してください:
この記事にコメントを残してください: