|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 はんだごて用のスタンドレギュレータです。 無線エレクトロニクスと電気工学の百科事典
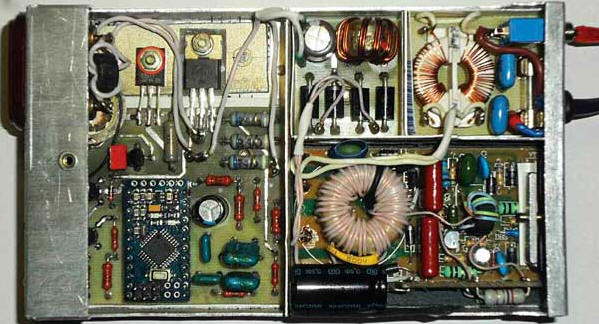
著者は、はんだごての動作モードを調整して安定させる自動装置を作成しただけでなく、それをはんだごてスタンドの「地下」に設置して、デスクトップ上のスペースを節約しました。 230 V のはんだごてを使用していて、ヒーターとこて先の間の絶縁破壊により、修理中の高価な測定器がまったく使用できなくなったという悲しい経験を長年続けてきましたが、私ははんだ付け装置に対する自分の態度を再考せざるを得ませんでした。 それ以来、私は信頼性の高い絶縁トランスを介した電源を備えた 36 V のはんだごてのみを使用してきました。 はんだ付けするコンポーネントのサイズと重量に応じて、さまざまな出力のはんだごてをいくつか使用する必要がありました。 はんだ付けステーションの使用は、その大きな寸法と、もちろんコストによって妨げられていました。 さまざまな状況で半田ごてだけを使用するために、サイリスタレギュレーターを介して唯一のはんだごてをオンにする試みがありましたが、はんだごてをネットワークに接続する変圧器の煩わしいハム音が原因で、別の解決策を探す必要がありました。問題。 手持ちのはんだごてが36Vのものばかりだったので、はんだごて選びには苦労しませんでした。 市販の便利なはんだごてスタンド(図1)をベースに、空いているスペースを合理的に利用できるように設計しました。 「地下室」の。
その結果、最大 40 W の電力と 36 V の電圧を備えたはんだごて用の使いやすいユニバーサル スタンド レギュレータが誕生しました。それに含まれる原理は、一部のコンポーネントを交換することで他の電圧のはんだごてにも使用できます。 、チョークの巻き上げデータを変更し、プログラムも調整します。 はんだごての電源には、電器店で購入したTRS 60Wハロゲンランプ用に改造した「電子変圧器」を使用しました(図2)。 その結果、干渉を減らすという問題を解決し、電気的な安全性に特別な注意を払う必要がありました。
私は長い間マイコンを使用してきましたが、今回は、はんだごての制御とその加熱を調整するために、ATmega328Aマイコンと16 MHzの水晶振動子を備えたArduino Pro Miniモジュールを初めて使用しました。 Arduino IDE用に設計されたプログラム開発環境。 開発されたプログラムでは、ボタンを押すことではんだごての 1 つの動作モードを選択し、選択したモードを維持して主電源電圧の不安定性を自動的に修正できます。 同じはんだごてを使用して、モード 5 はウッド合金などの低融点はんだの作業に使用でき、モード XNUMX では巨大なコンポーネントも通常どおり加熱できます。 調整原理は、はんだごてヒーターの電流電力を決定する式に基づいています。 P = iн2、XNUMX・Rн, ここで、Rн -ヒーター抵抗; 私н - そこを流れる電流の現在値。 デバイスの電源がオンになるたびに、はんだごてヒーターの抵抗が測定され、36 V の電圧での電力が計算され、それに基づいて 20 つのモードのそれぞれの電力が設定されます。 1% - モード 40 の場合。 2% - モード 60 の場合。 3% - モード 80 の場合。 4% - モード 100 の場合。 レギュレーターの概略図を図に示します。 3. 加熱電力は、約 500 Hz の周波数に続いて、調整可能なデューティ サイクルの矩形パルスではんだごてに電力を供給することによって調整されます。 電界効果トランジスタ VT4 は電源スイッチとして使用され、その特徴はゲート-ソース間容量がかなり大きいことです。 この静電容量の再充電によって引き起こされ、トランジスタ VT4 によって消費される電力の増加につながる制御信号の低下の増大を軽減するために、トランジスタ VT2 および VT3 が設計されています。
Arduino モジュールの出力 D9 から抵抗 R3 を介してパルスがトランジスタ VT2 を制御します。 ハイ論理レベルによりこのトランジスタが開き、ダイオード VD1 を介してトランジスタ VT4 のゲート-ソース間容量が急速に放電され、トランジスタが閉じます。 同時に、トランジスタ VT3 も閉じられます。 出力 D9 からの論理レベルが Low になると、トランジスタ VT2 が閉じられ、抵抗 R3 を流れる電流によってトランジスタ VT8 が開きます。 出力抵抗が低いエミッタフォロワであるトランジスタ VT3 は、トランジスタ VT4 のゲート-ソース間容量を急速に充電し、トランジスタ VTXNUMX を開きます。 Arduino の出力 D8 は、コントローラの現在の動作モードを表示し、緊急事態のインジケータとして機能する HL1 LED の制御に使用されます。 出力 D7 で、Arduino は圧電素子 HA1 に供給される音声信号を生成します。 入力 D2 は、SB1 ボタンのステータスをポーリングするために使用されます。 これが解放されると、ソフトウェアで有効になったマイクロコントローラの内部抵抗がこの入力で High 論理レベルを維持します。 ボタンを押すとレベルが低くなります。 はんだごてを流れる電流と、デバイスがはんだごてに供給されるパルスシーケンスを形成する電圧を測定するために、Arduino モジュール A0 と A1 のアナログ入力が使用されました。 はんだごて電流に比例したパルス電圧が抵抗器 R9 ~ R11 から除去されます。 フィルタ R14C8R15C9 は、この電流の平均値に比例する定数成分を抽出します。 入力 A0 に送られます。 電源電圧を測定するには、平滑フィルタ C12R13C6 を備えた分圧器 R7R5 が使用され、そこから定電圧が入力 A1 に供給されます。 Arduino モジュールとトランジスタ VT4 の制御ユニットには、並列統合スタビライザ DA9 とトランジスタ VT1 のスタビライザからの +1 V の電圧が供給されます。 もちろん、必要な電圧の二次巻線と整流器を備えた変圧器を使用する方が正確です。 ただし、簡単にするために、+9 V 電圧ははんだごての電源電圧から得られます。 トランジスタ VT1 がデバイス内で最も強力な熱源であることが判明したことを認めなければなりません。 電源コードおよびはんだごてコードは優れたアンテナであり、「電子変圧器」U1 の電圧変換器によって生成される広範囲の干渉を放射することができます。 干渉レベルを低減するために、個々のコンポーネントの部分シールドが使用され、1 巻線チョーク L3 ~ LXNUMX に XNUMX つのコモンモード ノイズ抑制フィルターが使用されました。 最初のフィルタ C1L1C4 は、電源への干渉の侵入を防ぎます。 チョークL2は、はんだごてが接続される出力に直接取り付けられています。 L3C7 フィルターは、整流器後のノイズのレベルを低減します。 このようなフィルタの貴重な特性は、動作する差動 (不平衡) 電圧と電流に影響を与えることなく、コモンモード (対称) 干渉を十分に減衰させることです。 レギュレーターにtRs 60W「電子トランス」を使用するには、改造が必要でした。 実際のところ、負荷電流フィードバックが使用されており、「変圧器」を本来の目的に使用する場合には適していますが、このようなフィードバックは許容負荷範囲を大幅に狭めるため、この場合はそうではありません。 負荷が 5 ~ 6 W 未満の場合、コンバータは改造しないとまったく動作しません。 しかし、簡単な変更により、負荷がなくても作業できるようになりました。 すべての改善点を簡略化した図に示します (図 4)。 取り外す必要があるチェーンには×印が付いています。 新しく追加された回路と要素は赤色で強調表示され、変圧器 T2 の巻き戻し巻線 II は青色で強調表示されます。 図内の要素の番号付けは任意であり、デバイス基板上の要素のマークと一致しない場合があります。
まず第一に、トランス T2 のはんだを取り除き、そこから巻線 II を取り除く必要があります。 信頼性を高め、電気的安全性を高めるために、幅 10 mm のストリップに切断したフッ素樹脂フィルム絶縁体を数層塗布し、巻線 I の上に薄いプラスチック チューブをこの巻線の端子に配置することをお勧めします。 新しい巻線 II には MGTF-0,35 ワイヤーを使用し、36 ターン巻きました。 二次巻線のリード線を固定するには、一般的な熱収縮チューブを上に置き、ヘアドライヤーで加熱することをお勧めします。 この後、トランスを所定の位置にはんだ付けできます。 保護抵抗器 R1 がコンバータのネットワーク入力に取り付けられました。 代わりに、S1/153/M などのサーミスタ RK10 を取り付けることをお勧めします。 追加のコンデンサ C1 と抵抗 R2 をブレッドボードの小さなセクションに配置し、メイン コンバータ ボードに対して垂直に固定することができます。 これは、直径 1,5 ~ 2 mm の硬質単芯銅線を使用して行い、コンデンサ C3 の下側端子とトランジスタ VT2 のエミッタが接続されている印刷導体にはんだ付けしました。 高さのサイズを小さくするために、抵抗器 R2 は、2,2 オームの抵抗と 1 W の電力で直列に接続された XNUMX つの抵抗器で構成できます。 変圧器 T1 から電流帰還巻線 I を取り除く必要があります。電流帰還巻線は、磁気回路の窓を通過する巻線です。 このターンの代わりに、ジャンパーを基板にはんだ付けする必要があります。 MGTF-0,07 のワイヤーから新しいフィードバック回路を作成します。 その一端を抵抗器 R2 にはんだ付けし、この線をトランス T2 (巻線 III) に 1 回巻き付けてから、トランス T2 (巻線 Ia) の磁気回路の窓を通して、ワイヤを抵抗器のもう一方の端子にはんだ付けします。 R1。 テスト中にコンバータが動作しない場合は、トランス TXNUMX から巻線 Ia を取り外し、磁気回路の窓に逆方向に通します。
デバイス本体は、図に示すスケッチに従って厚さ 1 mm のアルミニウム シートで作られています。 5. ケースの幅と高さははんだごて台の「底面」の内寸により制限され、長さは台の長さより10mm長くなります。 ワークピースの曲がりの場所に、弓のこなどで溝を切ります。 深さは、少し力を入れて手動でシートを曲げるのに十分な深さでなければなりません。 構造の強度が損なわれるため、深く切り込みすぎないでください。 展開図をマークするときは、曲がり部分ではアルミニウムシートの厚さを考慮する必要があることを覚えておく必要があります。 本体の前部 (図 5 によると右側) には、幅 5 mm の棚があり、本体の残りの部分より 2 mm 高くなります。 この棚はスタンドの前部がはまる錠のようなものです。 スケッチによると、本体の左側に穴が開けられており、そこに脱落防止ナット M2,5 がフレアされているため、スタンドの前部をロックに取り付けた後、後部の少なくとも半分がネジ山をブロックします。ナットの穴。 糸を開けるには、スタンドの背面に取り付けられたナットの反対側に丸い針やすりで切り込みを入れます。 そしてスタンドを本体にネジで固定します。 ケースの前壁には、コンバータのトランジスタを固定するための M3 ネジ、電源コード用のゴムブッシュ、および SA1 電源スイッチ用の穴を準備する必要があります。 入手可能な部品とその設計特徴に基づいて、穴の位置とそのサイズを現地で確認します。 ケースの後壁には、はんだごて XS1、ボタン SB1、LED HL1 用のソケット用の穴を開ける必要があります。 制御デバイスを PCB ハウジングに取り付ける前に、ボタンと LED の穴の位置を決定します。 ソケットの下には、HA5 ピエゾ エミッタを備えたプリント基板の一部があるため、ケースの底部からできるだけ離れた制御装置コンパートメントの右上隅 (図 1 による) にソケットを取り付けます。その上に設置されています。 安全のため、標準のはんだごてプラグを通常の電源ソケットと互換性のない別のはんだごてプラグに交換し、その新しいプラグに対応したソケットをレギュレーターに XS1 として取り付けることをお勧めします。 これにより、はんだごてを誤ってネットワークに接続する可能性が排除されます。 次に、厚さ約 0,5 mm のアルミニウム シートでハウジング コンパートメントを区切るスクリーンを作成します。 高さはできるだけ高くする必要があります。 幅5mmのスクリーン下部を直角に曲げ、直径1,5~2mmの皿リベットで本体に取り付けます。 リベットが使用されるのは、ケースの底部とプリント基板の底面の間に小さな隙間があるためです。 プリント基板の端とスクリーンの間の隙間は、プレス木材で作られた絶縁ボックスを収容するために少なくとも 1 mm 幅でなければなりません。 図によれば、上部にあります。 5、制御装置コンパートメントの一部に、トランジスタ VT1 と VT4 用のアルミニウム製ヒートシンク プレートを取り付けます。 その寸法は50x20 mm、厚さ - 2,5.3 mmです。 事前に熱伝導性ペースト KPT-8 で接触面を潤滑した上で、プレートをハウジングの底部にリベットで固定します。 組み立てたデバイスの外観(はんだごて台を取り付けていない状態)を図に示します。 6.
片面ネットワークフィルタープリント基板の図を図に示します。 7. 高さ 1 mm 以下の脱落型 M2,5 ナットを、プリント導体の側面からインダクタ L3 の下にある大径の穴に挿入し、フレア状に広げます。 これは、ボードをケースの底部に固定するネジ用であり、対応する穴を開ける必要があります。
ヒューズリンク FU1 の場合は、S1050 ホルダーを基板に取り付けます。 コンデンサC1とC4はK73-17、インダクタL1は故障したデバイスから既製のものを使用しました。 各巻線のインダクタンスは 3,3 mH です。 PLD または PLS コネクタのピン コンタクトなど、ボードの外部接続用の穴に取り付けラックを取り付けることをお勧めします。 ネットワーク フィルター回路基板をケースに取り付ける前に、厚さ 0,5 mm のプレス ボードからケース コンパートメントのサイズに合わせてボックス ブランクを切り出し、折り曲げます。 ボックスの側壁は、基板に取り付けられているすべての要素よりも高くなければなりません。 このようなボックスは、レギュレータのハウジングをボード上の主電源電圧の回路から確実に隔離します。 箱にはSA1スイッチ、電源コード、基板固定ネジ用の穴をあらかじめ開けておく必要があります。 ボックスをコンパートメントに挿入した後、プリント基板をボックスに取り付け、ケースの底部からネジで固定します。 ネジの長さは、先端が基板の上面からはみ出さない長さにしてください。 次に、SA1スイッチ(今回はTNX-01を使用しました)と電源コードのゴムブッシュを取り付けます。 整流器プリント基板の図を図に示します。 8. プリント導体は両面で使用できます。 コンデンサ C7 は、より高い周波数のパルス モードで動作できなければなりません。 そこで、HITANOのEXRシリーズのコンデンサを使用します。 ESG シリーズ コンデンサまたは他のメーカーの同様のコンデンサを使用することもできます。
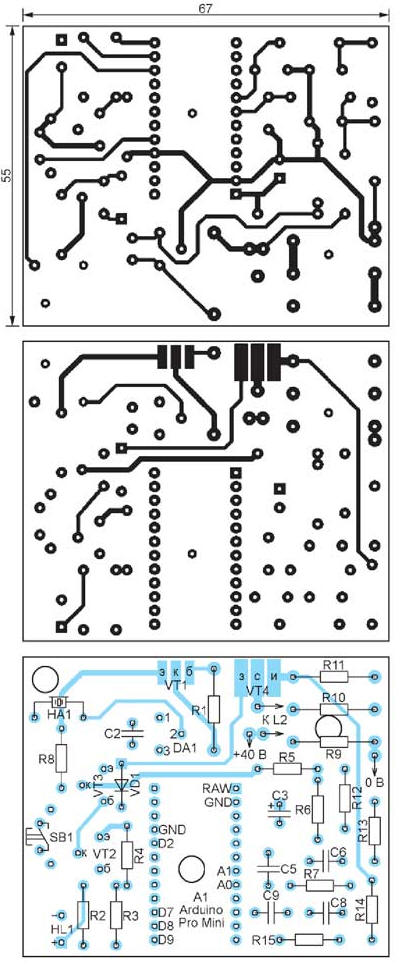
チョーク L3 は、各巻線のインダクタンスが 15 μH の別のデバイスからのものです。 この完成したインダクタの巻線は異なる方向に巻かれているため、図 8 に厳密に従って接続する必要があることに注意してください。 0,8. 既製のインダクタがない場合は、適切なフェライト リング磁気コアを使用して簡単に自作できます。 巻線は、直径 15 mm の二重ワニス線を XNUMX 層で充填されるまで巻き付けます。 同一の巻線のそれぞれのインダクタンスが少なくとも XNUMX μH であることを確認することをお勧めします。 取り付けラックの取り付け、プレスパン ボックスでボードを絶縁し、固定するための上記の推奨事項は、このボードに適用されます。 ハウジングから取り外した「電子変圧器」と改造した電圧変換基板は同じ箱を作成する必要があります。 冷却するには、コンバータのトランジスタを絶縁ガスケットを介してケースの前壁に押し付ける必要があるため、ボックスの隣接する壁の高さを慎重に選択する必要があります。 残りの壁をできるだけ高くします。 変換基板を所定のコンパートメントに一時的に取り付けたら、トランジスタがケースに押し付けられている位置を確認します。 次に、熱伝導性ペーストであらかじめ潤滑された厚さ 0,15 mm 以上の絶縁マイカ プレートをこれらの場所に取り付けます。 これらのプレートの寸法は、トランジスタ ハウジングの対応する寸法より 2 ~ 3 mm 大きくする必要があります。 あらかじめ入出力線を変換基板にはんだ付けしておく必要があります。 入力 - MGSHV、出力 - MGTF-0,35。 絶縁ボックスをコンパートメントに挿入したら、コンバータボードをその中に取り付けます。あらかじめ本体との熱接触側のトランジスタを熱伝導性ペーストで潤滑してください。 次に、「電子変圧器」で使用されるプラスチックまたは金属のクランプを使用して、トランジスタをケースの前壁に押し付けます。 クランプが金属製の場合は、クランプがコンバータ基板上のコンポーネントに触れないよう、その下にプレスパン ガスケットを置くことをお勧めします。 制御装置の両面プリント基板を図に示します。 9. 他のボードのように XNUMX つではなく、XNUMX つの脱落防止ナット用のスペースが提供されます。 一部の部品は部分的にナットと重なる可能性があるため、部品を取り付ける前にフレア加工することをお勧めします。 ナットをフレアした後、ボードをテンプレートとして使用して、ハウジングの底部に取り付け穴をマークし、ドリルで開ける必要があります。
Arduino Pro Mini モジュールにはかなり大きなプログラミング コネクタがあり、はんだごてスタンドの底面には突起があり、制御ボードが正しく取り付けられていない場合、このコネクタに当たる可能性があることに注意してください。 これを避けるためには、基板を取り付けるときに特に注意するだけでなく、Arduino モジュールのピンを所定の穴にできるだけ深く差し込み、はんだ付け後に基板から飛び出ているピンの部分を切断する必要があります。底。 トランジスタ VT1 と VT4 を除くすべての部品を基板に取り付けます。基板の両面にあるプリント導体が取り付けられる部品の端子を両面にはんだ付けする必要があることを忘れないでください。 設置後、筐体壁面のSB1ボタンとHL1 LEDの穴の位置を確認し、ドリルで穴を開けてください。 最後にボードを取り付けるときは、その下にプレスパンガスケットを置く必要があります。 制御基板を取り付けたら、ヒートシンクプレート上のトランジスタ VT1 と VT4 の位置を決め、固定するための穴を開けます。 VT4 トランジスタの下にマイカガスケットを置き、M2,5 ネジとナットで固定し、ネジに絶縁スリーブを置き、ナットの下に絶縁ワッシャーを置きます。 ガスケットに熱伝導性ペーストを塗布することを忘れないでください。 2SC3611 トランジスタが VT1 として選択されたのは、そのプラスチック ハウジングが追加の絶縁なしでヒートシンクに取り付けられるためです。 ただし、接合面に熱伝導ペーストを塗布する必要はあります。 ヒートシンクに取り付けられたトランジスタのリード線を、制御基板上のトランジスタ用の接触パッドにはんだ付けします。 ボード間にワイヤを通すには、コンパートメントを区切るスクリーンに小さな切り込みを入れます。 コントロールユニットボードから XS1 ソケットに来るワイヤは、10NM6 フェライトで作られた標準サイズ K4,5x2000x1 のリングを通過させ、2 回巻く必要があります。 これがスロットルLXNUMXになります。 あとは電源コードを接続するだけです。 正しい設置と、主電源電圧下でデバイス本体とその回路の間に電気的接続がないことを確認するには、抵抗測定モードでマルチメーターを使用することをお勧めします。 コンバータの主電圧回路と二次回路の短絡を監視することは不必要ではありません。 はんだごて台では、台座とバネを接続しているボルトを平頭のものに交換する必要があります。 このヘッドにはプレススパン製の絶縁パッドを貼り付けることをお勧めします。 T2 トランスの中心の反対側、スタンドのベースにゴム製プラグを接着することをお勧めします。 さらに、基板をケースに押し付けて振動を抑制するため、機器のケースに実装されているコンバータトランジスタの端子が破損する可能性があります。 プログラムをArduino Pro Miniモジュールにロードするには、インターネットに接続されたコンピュータと、できればUSBインターフェースを備えたプログラマが必要です。 Web サイト http://arduino.cc にアクセスし、そこから無料の Arduino IDE プログラム (Arduino 用のプログラム開発環境) をダウンロードします。 このプログラムをコンピュータにインストールした後、記事に添付されているファイル Reg_Sold.ino を開きます。 「ツール→ボード」メニューで「Arduino Pro または Pro Mini」を選択し、「ツール→プロセッサ」メニューで「ATmega328 (5V、16 MHz)」を選択します。 「ツール→プログラマ」メニューで、プログラムをモジュールにロードするために使用するプログラマをリストから選択する必要があります。 メニュー項目「スケッチ→チェック/コンパイル」を選択してプログラムのコンパイルを開始します。 コンパイルが成功したら、プログラマを Arduino Pro Mini モジュールのプログラミング コネクタとコンピュータの USB コネクタに接続します。 Arduino Pro Mini ボードの LED1 が点灯するはずです。 「プログラマー経由でスケッチをロード」メニュー項目を選択します。 ダウンロードが成功すると、プログラム ウィンドウの下部に表示され、デバイスからビープ音が鳴り始め、その後プログラマの電源をオフにすることができます。 次に、ケースにスタンドを取り付けずに、デバイスの電源を入れて動作をテストします。 プラグを電源ソケットに差し込んだ状態で、はんだごてをソケット XS1 に接続し、スイッチ SA1 でデバイスの電源を入れます。 コンバータの通常動作を最初に評価するには、デバイスの HL1 LED と Arduino モジュールの LED1 LED を点灯するだけで十分です。 デジタル マルチメーターを使用して、整流器基板を制御基板に接続するワイヤ間の DC 電圧を測定します。 36 V 以上、45 V 以下である必要があります。電圧が高すぎると、トランジスタ VT1 が大幅に発熱します。 共通ワイヤ (コンデンサ C1 のマイナス端子) を基準としたトランジスタ VT7 のエミッタにおけるスタビライザの出力電圧を測定します。 8,5 V 以上、9,5 V 以下でなければなりません。そうでない場合は、抵抗 R5 の抵抗値を選択する必要があります。 SA1 スイッチを使用してデバイスの電源を切り、少なくとも 100 V の制限で DC 電圧測定モードではんだごてにマルチメータを並列に接続します。デバイスの電源を入れた後、マルチメータにはんだごての電圧がどのように表示されるかが表示されます。最大まで増加します。 この場合、HL1 LED は継続的に点灯するはずです。 加熱を促進するために、電圧は約 XNUMX 分間最大のままになります。 この間、Arduino モジュールのマイクロコントローラーは、測定された電圧と電流の値を使用してはんだごてヒーターの抵抗を計算します。 同じ種類のはんだごてでもヒーターの抵抗値が異なる場合があるため、はんだごてを交換する場合は、電源を入れ直して抵抗値を測定する必要があります。 次に、デバイスは短い音声信号でモード 3 に切り替わります。 LED が XNUMX 回点滅してこれを知らせます。 マルチメーターは電圧の低下を示し、デバイスは電圧の調整を開始し、ヒーター電力をこのモードに設定されたものと等しく維持します。 SB1 ボタンを押して、1 つのモードすべてがオンになることを確認する必要があります。 押すたびに音声信号が発生する必要があります。 その後のHL5 LEDの点滅回数はモード番号と同じになります。 電圧調整プロセスが本質的に振動的ではないことをマルチメーターで確認したら、次のモードに進むことができます。 モード 4 に達したら、ボタンを押すとモード 1 がオンになり、番号の降順に切り替わります。 モード 2 で ボタンを押すとモード 5、さらにモード XNUMX に設定されます。 マルチメーターを取り外し、モード 3 に設定し、デバイスをチェックして、はんだごての断線とそれに接続されているワイヤの短絡を検出します。 断線を確認するには、デバイスの電源を切らずに、XS1 ソケットからはんだごてプラグを取り外します。 特徴的な音声信号が聞こえ、HL1 LED が 1 回点滅します。 その後、装置ははんだごて回路が復旧したかどうかを定期的に確認し、設定モードに切り替えてアラーム音を止めます。 はんだごてプラグを XSXNUMX ソケットに再度挿入すると、デバイスはこれを検出し、通常の動作に戻ります。 短絡検出を確認するには、デバイスのプラグを抜き、XS1 ソケットからはんだごてプラグを取り外し、ソケットをジャンパー線で接続します。 ネットワークに接続した後、デバイスは短絡を検出すると音声信号を鳴らして、HL1 LED を XNUMX 回短くオフにする必要があります。 短絡のさらなるチェックは実行されません。 デバイスの動作は、短絡の原因を取り除いた後、主電源をオフにしてからオンにすることによってのみ回復できます。 デバイスで使用されているコンポーネントは、類似品または同様のパラメータを持つコンポーネントと置き換えることができます。 抵抗器は、電力図に示されている任意のタイプを使用できます。 抵抗 R5 および R6 は、±1% の抵抗許容差で使用することをお勧めします。 コンデンサ C5、C6、C8、C9 はセラミックです。 モードの切り替えには長さ3mmのプッシャーが付いたタクトボタンTS-A130PV-7を使用します。 HL1 LED は任意のタイプと色にすることができます。 音声警報器HA1として、直径20mm、共振周波数3,9kHzの圧電素子FTBD-1T-20A3,9を搭載しています。 必要に応じて、寸法が妨げにならない場合には、異なる共振周波数の圧電素子を使用できます。 新しい周波数値はプログラムで指定する必要があります。 これを行うには、Arduino IDE で Reg_Sold.ino ファイルを開き、次の行を見つけます。 #defineREZ_FREQ3900。 この中で、数値 3900 を圧電素子の共振周波数 (ヘルツ単位) の新しい値に置き換える必要があります。 変更したプログラムをコンパイルしたら、上記の方法を使用してそれをマイクロコントローラーにロードします。 マイクロコントローラー プログラム: ftp://ftp.radio.ru/pub/2017/02/reg_sold.zip。 著者:A。ディモフ
タッチエミュレーション用人工皮革
15.04.2024 Petgugu グローバル猫砂
15.04.2024 思いやりのある男性の魅力
14.04.2024
▪ LMX243x - PLL 回路に基づく周波数シンセサイザ
▪ サイトの「通話とオーディオ シミュレーター」セクション。 記事の選択 ▪ 記事 英国議会でカーフスキンは何に使われていますか? 詳細な回答 ▪ 記事 手動タイプセッター。 労働保護に関する標準的な指示 ▪ 記事 オペアンプ タイプ 741 (140UD7) のいくつかのアプリケーション。 無線エレクトロニクスと電気工学の百科事典 ▪ 記事 XNUMX つの停電信号装置。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |





 この記事にコメントを残してください:
この記事にコメントを残してください: