PIC16F84のMIDIキーボード。 無線エレクトロニクスと電気工学の百科事典

無線電子工学と電気工学の百科事典 / 音楽家
 記事へのコメント
記事へのコメント
提案された 48 キー MIDI キーボードは、パーソナル コンピューター (PC) またはキーボードレス シンセサイザーと連携して動作するように設計されています。 16 MIDI チャンネルを提供します。 内蔵ノブを使用して、ボリュームを制御したり、31 個のコントローラーのいずれかを操作したりできます。 PIC16F84 マイクロコントローラ (MC) の使用により、デバイス回路を簡素化できるだけでなく、コストと実行の複雑さを大幅に削減することが可能になり、この分野で従来の i8051 MC は廃止されました。
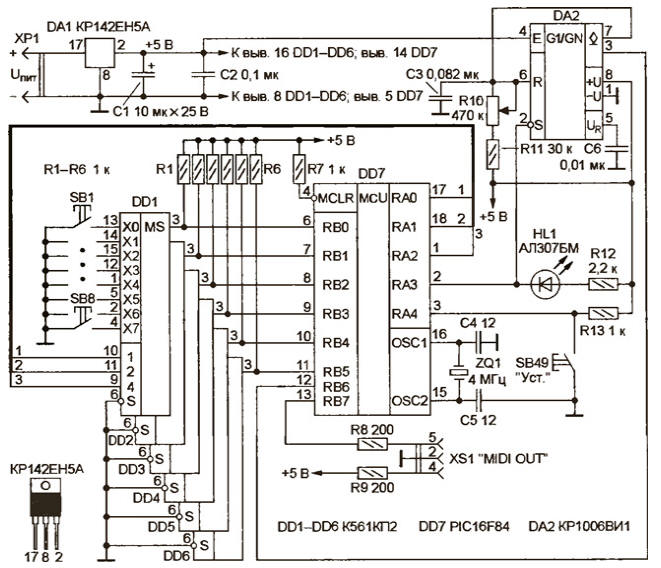
提案する MIDI キーボードの概略図を図に示します。 その基礎となっているのは MK DD7 で、すべてのマニピュレーターをポーリングし、MIDI インターフェースを構成する基本操作を実行します。 マルチプレクサ DD1 ~ DD6 は、動的なキー ポーリングを実装するように設計されています。 7 つのサブキー接点グループがそれぞれに接続されており、出力からの信号は MK DD1 のポート B の対応する入力に供給されます (図では DDXNUMX のみが完全に示されており、残りは同じ方法でオンになります)。

(クリックして拡大)
ボリューム コントロール (可変抵抗器 R10) は、DA2 タイマーに組み込まれた単一のバイブレータの RC 回路に含まれています。 エンジンの位置は、RB6 DD7 の入力で受信されるパルスの持続時間によって決まります。 単一のバイブレータは、RA3 出力からのパルスによってトリガーされ、同時に動作モード インジケータである HL1 LED を制御します。 MK DD7 の動作を制御するプログラムはキーボードをポーリングします。 キーの押下または解放が検出されるとすぐに、対応する MIDI メッセージを送信するプロシージャが呼び出されます [1]。 PIC16F84 にはユニバーサル非同期シリアル トランシーバー (UART) が組み込まれていないため、プログラムは単純なシフト操作を使用して MIDI インターフェイスのソフトウェア構成を実装します。
抵抗器 R10 のスライダーの位置を計算するとき、コントローラーのマニピュレーターまたはボリューム コントロールとしての構成が考慮されます。 最初のケースでは、読み取られた値が最後のサイクルで記録されたポーリングと比較され、その差が 10 回連続して確立された場合、対応する MIDI メッセージが送信されます。 R32 抵抗スライダーの位置はコントローラーによって 10 ビット コードにデジタル化されるため、デバイスは XNUMX の異なる位置を感知します。 RXNUMX がボリューム コントロールとして「設定」されている場合、必要な情報がキー押下イベントとともに送信されます。
SB49 ボタンを使用すると、HL1 LED で示されるように、デバイスは設定モードに切り替わります。 この場合、キーストローク メッセージはデバイスの出力に送信されません。
最初の 16 個のキー (DD1 および DD2 マルチプレクサーに接続されている) のいずれかを押すと MIDI チャンネルが切り替わり、他の 32 個のキーのいずれかが対応するコントローラー番号を選択し、R10 抵抗器によって制御されます。 SB17 キーが押された場合 (その接点が DD0 の X3 入力に接続されている)、R10 はボリューム コントロールとして設定され、それ以外の場合 (SB18、SB19 などを押すことにより) - MIDI-koh-troller キーパッドとして設定されます。 SA18 ~ SA48 キー (SA18 - コントローラ O、SA19 - コントローラ 1 など) を押すことで割り当てられます。
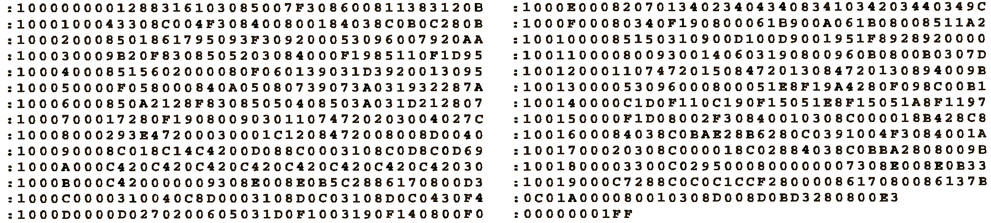
ヘキサファイル形式のプログラムコードを表に示します。 9 行目の最初のバイト (番号 29h) は、キーボードが開始されるノートの番号を指定する定数です。 著者のバージョンでは、最初の音は第 3 オクターブの F41 ~ F (音番号 9、MIDI メッセージで受け入れられます) です。 別のキーボードを使用する場合は、この定数を修正し、XNUMX 行目のチェックサムを再計算する必要があります。
プログラムのソース コードと記事のその他の追加資料

(クリックして拡大)
デバイス用のプリント基板は開発されていません - ほとんどの部品 (超小型回路 DD7、DA1、DA2、抵抗、コンデンサ、水晶振動子) はブレッドボード上に実装されており、すべての接続は MGTF ワイヤで行われます。 キー接点までのハーネスの長さを短縮するために、マルチプレクサ DD1 ~ DD6 がキーボードの直下に取り付けられています。 XP1 コネクタに接続された電源の出力電圧は、約 6 mA の電流で 12 ~ 50 V である必要があります。
若干の変更を加えることで、K561KP2 (DD1 ~ DD6) を K561KP1 マルチプレクサに置き換えることができます。 このデバイスでは、PIC16F84 MK に加えて、PIC16F84A または PIC16CR84 を使用できます。 PIC16C84やPIC16F83と直接置き換えることはできません。 R10 として、機能特性 A の抵抗図に示されている任意の可変抵抗器を使用できます。 XS1 ソケットは標準の 4 ピン ONTS-VG-5-16 / 5-r (DIN-XNUMX) です。
キーボードは調整の必要がほとんどなく、部品の状態が良好で取り付けミスがなければ、電源を入れるとすぐに動作し始めます。 抵抗 R10 のスライダーの位置が正しく決定されていない場合は、コンデンサ C3 と抵抗 R11 を選択する必要があります。 シーケンサプログラムをお持ちの場合は、キーボードを PC に接続して、デバイス全体が正しく動作するかどうかを確認できます。 PC に接続するには、たとえば、[2] で説明されているものと同様に、インターフェースの光電子デカップリングを提供するアダプターが使用されます。
PC で常にキーボードを使用する場合は、スイッチング コンバータ [3] をゲーム ポートの +5 V 電源に接続して電源供給に使用できます。 この場合、R12 の消費電流を減らすには、R1 をより高い抵抗の抵抗に置き換えるか、HLXNUMX LED を完全に除外することをお勧めします。
文学
- Studnev A. MIDI キーボード。 - ラジオ、1993 年、第 11 号、p. 32-34。
- Rev N. PC用のシンプルなMIDIキーボード。 - ラジオ、2000 年、第 3 号、p. 25、26、44。
- Vlasov Yu. 独立した励起を備えたシンプルなコンバーター。 - ラジオ、1996 年、第 7 号、p. 50.
著者: A.ボリセヴィッチ、セヴァストポリ、ウクライナ
 他の記事も見る セクション 音楽家.
他の記事も見る セクション 音楽家.
読み書き 有用な この記事へのコメント.
<<戻る
 科学技術の最新ニュース、新しい電子機器:
科学技術の最新ニュース、新しい電子機器:
タッチエミュレーション用人工皮革
15.04.2024
距離を置くことがますます一般的になっている現代のテクノロジーの世界では、つながりと親近感を維持することが重要です。ドイツのザールランド大学の科学者らによる人工皮膚の最近の開発は、仮想インタラクションの新時代を象徴しています。ドイツのザールラント大学の研究者は、触覚を遠くまで伝えることができる超薄膜を開発した。この最先端のテクノロジーは、特に愛する人から遠く離れている人たちに、仮想コミュニケーションの新たな機会を提供します。研究者らが開発した厚さわずか50マイクロメートルの極薄フィルムは、繊維に組み込んで第二の皮膚のように着用することができる。これらのフィルムは、ママやパパからの触覚信号を認識するセンサーとして、またその動きを赤ちゃんに伝えるアクチュエーターとして機能します。保護者が布地に触れるとセンサーが作動し、圧力に反応して超薄膜を変形させます。これ ... >>
Petgugu グローバル猫砂
15.04.2024
ペットの世話は、特に家を清潔に保つことに関しては、しばしば困難になることがあります。 Petgugu Global のスタートアップ企業から、猫の飼い主の生活を楽にし、家を完璧に清潔で整頓された状態に保つのに役立つ、新しい興味深いソリューションが発表されました。スタートアップの Petgugu Global は、糞便を自動的に流し、家を清潔で新鮮に保つことができるユニークな猫用トイレを発表しました。この革新的なデバイスには、ペットのトイレ活動を監視し、使用後に自動的に掃除するように作動するさまざまなスマートセンサーが装備されています。この装置は下水道システムに接続されており、所有者の介入を必要とせずに効率的な廃棄物の除去を保証します。また、トイレには大容量の水洗トイレがあり、多頭飼いのご家庭にも最適です。 Petgugu 猫砂ボウルは、水溶性猫砂用に設計されており、さまざまな追加機能を提供します。 ... >>
思いやりのある男性の魅力
14.04.2024
女性は「悪い男」を好むという固定観念は長い間広まっていました。しかし、モナシュ大学の英国の科学者によって行われた最近の研究は、この問題について新たな視点を提供しています。彼らは、男性の感情的責任と他人を助けようとする意欲に女性がどのように反応するかを調べました。この研究結果は、男性が女性にとって魅力的な理由についての私たちの理解を変える可能性がある。モナシュ大学の科学者が行った研究により、女性に対する男性の魅力に関する新たな発見がもたらされました。実験では、女性たちに男性の写真と、ホームレスと遭遇したときの反応など、さまざまな状況での行動についての簡単なストーリーを見せた。ホームレス男性を無視する人もいたが、食べ物をおごるなど手助けする人もいた。ある研究によると、共感と優しさを示す男性は、共感と優しさを示す男性に比べて、女性にとってより魅力的であることがわかりました。 ... >>
| アーカイブからのランダムなニュース Facebookからの無料インターネット
06.08.2014
最も裕福で最年少の億万長者の 16 人であるマーク ザッカーバーグ (フォーブス ランキングで 32,5 位、資本金は 11 億ドル) が所有する Facebook ソーシャル ネットワークは、アフリカのザンビア州の住民に Facebook と XNUMX の他モバイル トラフィックに課金することなく、スマートフォンからサイトにアクセスできます。 この機会は Airtel オペレーターと協力して提供され、加入者のみが利用できると同社は述べた。
メッセンジャー (m.facebook.com/messages) を含む Facebook Web サイト (m.facebook.com) のモバイル バージョンに加えて、サブスクライバーは Airtel Web サイトのローカル バージョン、AccuWeather、eZeLibrary、 Facts for Life、Google、Go Zambia Jobs、Kokoliko、MAMA、Wikipedia、WRAPP、Zambia uReport。
eZeLibrary Web サイトは、ザンビアの法律を紹介するために設計されており、現在開発中です。 Facts for Life は子供の健康に焦点を当てており、Go Zambia Jobs と Kokoliko は地元の企業の仕事に焦点を当てており、MAMA (母性行動のためのモバイル アライアンス) は母性と家族計画に焦点を当てており、WRAPP (Women's Rights App) は女性の権利に焦点を当てています。 HIV - 感染症。
サブスクライバーは、これらのサイトに次の XNUMX つの方法でアクセスできます。Internet.org アプリケーションを介して、以前にダウンロードして Android スマートフォンにインストールした後、Internet.org Web サイトを介して、または Android 用の Facebook アプリケーションを介してアクセスします。
「Internet.org アプリを使用すると、人々はモバイル インターネットの料金を請求することなく、さまざまな健康、雇用、地域にやさしいリソースにアクセスできるようになります。これにより、インターネット ユーザーの数が増え、以前は見つけられなかった有用な情報を見つけることができるようになることを願っています。利用できませんでした」と彼らは Facebook にコメントしました。
12 のサイトへの無料アクセスは、Facebook が後援する Internet.org イニシアチブの第一歩です。 このソーシャル ネットワークは、Nokia、Samsung、Ericsson、MediaTek、Qualcomm、Opera Software のサポートを獲得しています。 両パートナーは協力して、開発途上国のより多くの人々がインターネットにアクセスできるようにしたいと考えています。 このイニシアチブの一環として、Facebook は、地球の隅々までインターネットを「届ける」ための通信対応ドローンも開発しています。
|
その他の興味深いニュース:
▪ 白金原子は室温で一酸化炭素を酸化する
▪ 記憶のある服は持ち主になじむ
▪ 不透明な透明度
▪ フルスピード USB 430 を搭載した MSP2.0
▪ 牛乳を低温殺菌する新しい方法
科学技術、新しいエレクトロニクスのニュースフィード
 無料の技術ライブラリの興味深い資料:
無料の技術ライブラリの興味深い資料:
▪ サイトのセクション パワーレギュレーター、温度計、サーモスタビライザー。 記事の選択
▪ 記事 泥棒の帽子が燃えています。 人気の表現
▪ 記事 病院の医師が手を洗って消毒する必要があることを、いつ誰が発見したのでしょうか? 詳細な回答
▪ クペナ薬局の記事。 伝説、栽培、応用方法
▪ 記事 情報の音声出力を備えた車載車両制御システム。 無線エレクトロニクスと電気工学の百科事典
▪ 記事ニンジン噴霧器。 物理実験
この記事にコメントを残してください:
 このページのすべての言語
このページのすべての言語
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー

www.diagram.com.ua
2000-2024






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese