|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 電動自転車用トリップコンピューター。 無線エレクトロニクスと電気工学の百科事典
読者は、電動自転車用に設計された外部電流センサーを備えた PIC16F876A マイクロコントローラー上のトリップ コンピューターに招待されます。 ディスプレイには、動きのパラメータとバッテリーの電圧、バッテリーから消費される電流、電力と電力消費量の両方が表示されます。 このデバイスはアクセス可能な要素ベースで作成されており、簡単に再現できます。 電動自転車の動作モードを制御するには、さまざまな測定器が使用されます。 電気パラメータはパワー アナライザ [1、2] によって測定され、動作パラメータはさまざまな電子自転車コンピュータ [3]、さらには機械式速度計 [4] によって制御されます。 電動自転車用の特別なディスプレイ [5] もあり、必要なパラメータをすべて表示しますが、コストが高くなります。 これに基づいて、外部電流センサーを備えた PIC16F876A マイクロコントローラーで電動自転車用のトリップ コンピューターを開発しました。 主な技術的特徴
括弧内は、対応するパラメータの表示の離散性を示します。 トリップコンピュータは現在時刻を 1 分の分解能で表示します。 トリップコンピュータの仕組みを図に示します。 1. マイクロコントローラー DD2 (PIC16F876A-I/P) は、周波数 2 MHz の ZQ8 水晶共振器によって安定化された発振器によって電力を供給されます。 XP1 コネクタは、マイクロコントローラーをプログラミングするために提供されています。 PICkit2プログラマを接続しました。 マイクロコントローラー プログラムは、Flowcode グラフィカル環境 [6] で開発されました。
電圧と電流の測定は、マイクロコントローラーの内部 10 ビット ADC を使用して行われます。 電圧を測定する場合、分圧器 R5R9R12 からの信号がマイクロコントローラーのアナログ入力 AN0 (RA0) に供給されます。 電流を測定する場合、電流センサーRの両端の電圧降下ш オペアンプOPA241(DA1)を増幅します。 オペアンプの出力から、増幅された信号がマイクロコントローラーのアナログ入力 AN1 (RA1) に入力されます。 ゲインは Oy フィードバック回路のトリマ抵抗 R13 によって設定され、OPA241 の代わりに、SO-8 パッケージのほぼすべてのシングル レールツーレール オペアンプ (OPA340 や TS507 など) を使用できます。 プログラムは、電流と電圧の測定値に基づいて電力と電力消費量を計算します。 75 A の電流で 2 mV の電圧降下を持つ標準測定シャント 0.5SHISV.15-75-15 をリモート電流センサーとして使用しました。抵抗が 5 ~ 10 mΩ の標準シャントまたは同様の自己抵抗値を持つ任意の標準シャントを使用しました。製作したものは代替品として使用できます [7]。 トリップ コンピュータは、調整トランジスタ VT1 と TL431ID (DA2) マイクロ回路で構成されるリニア電圧レギュレータによって電力を供給されます。 電源回路にVD1R10C6C7回路を搭載し、電動モーターの走行時に発生するノイズを低減します。 抵抗 R16 と R17 は、コンデンサ C6 と C7 の間の電圧分布を均一にします。 最大許容入力電圧 (バッテリ電圧) は、トランジスタ VT1 の許容コレクタ-エミッタ電圧、その許容消費電力、ヒートシンクの品質、および抵抗 R19 ~ R22 によって放出される電力によって決まります。 図に示されている安定化要素を使用すると、バッテリー電圧は75 Vを超えてはなりません。ただし、デバイスはインジケーターに最大102,3 Vの値を表示できます。 トリップコンピュータは、厚さ 1,5 mm のグラスファイバー製の片面プリント基板で作られています。 基板のプリント導体の図とその上の要素の配置を図に示します。 2と図。 3. 図では。 図4にその外観を示す。
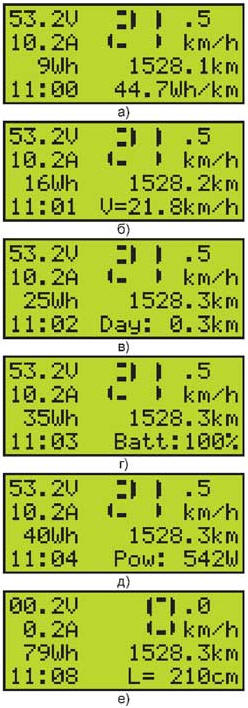
ボードの前面には、PIC16F876A マイクロコントローラー、ZQ2 水晶振動子、DS1307 リアルタイム クロック チップ、トリマー抵抗器、VT1 トランジスタ、XP1 コネクタ (PLS-5R コーナー ピン ブロック)、および PLS-14 ブロックがあります。接続用のHG1インジケーターが取り付けられています。 コネクタの嵌合部分は、HG1 インジケータの取り付け穴 (メス PBS-14 ブロック) にはんだ付けされます。 1V G2032 CR3 リチウム電池が BH-642 ホルダーに取り付けられています。 他のすべての要素はプリント導体の側面に取り付けられます。 円筒形の水晶共振子 ZQ1 (32768 Hz) が、DD1 チップのピン 2 と 1 の隣のプリント導体の側面にある穴にはんだ付けされています。 本体の上部は、コモンワイヤに接続されたフォイルセクションにはんだ付けされています。 トリップ コンピュータ ボードは、M10 ネジを使用して高さ 12 ~ 3 mm の XNUMX つの金属ラック上の LCD ボードに取り付けられます。 表面実装用のサイズ 120b の抵抗とコンデンサが使用されます。 コンデンサ C6 および C7 は、フレーム サイズ E の表面実装酸化タンタル コンデンサです。容量が 6,8 ...の同じサイズの他のコンデンサと置き換えることができます。 電圧レギュレータの npn トランジスタ BD139 の代わりに、許容コレクタ - エミッタ間電圧が 126 V を超える TO-80 パッケージ内の同じ構造の別のトランジスタ (BD179、MJE182 2N5192、BF469、KT817G など) を使用できます。 面積約6 cmの銅またはアルミニウムの薄いシートのストリップがトランジスタケースの下に配置されます。2ヒートシンクとして機能します。 トランジスタはナット付きM3ネジで基板に取り付けられています。 測定誤差シャント R を減らすにはшバッテリーのマイナス端子にできるだけ近づけて設置する必要があります。 トリップコンピュータへの接続はすべて細いワイヤで行うことができます。 トリップコンピュータリードスイッチSF1(パスセンサー)接続用、シャントRшと、トリップコンピュータケースに取り付けられた図示しないPC1TVコネクタのGB7バッテリーを使用しました。 リードスイッチは故障した電子サイクルコンピューターから取られたものです。 トリップコンピュータのパラメータの表示は、バックライトなしの電源電圧 1604 V の 5 行 LCD WH220A に表示されます。 これが存在しない理由は、バックライトによって消費される大電流 (1 mA) によって説明され、VTXNUMX トランジスタの過熱につながる可能性があります。 LCD には、トリップ コンピュータの電源を入れた瞬間からの電圧、電流、消費電力量、現在時刻、速度、総走行距離、および電気エネルギーの比消費量の 4 つのパラメータが同時に表示されます (図 XNUMX を参照)。 速度値は疑似グラフィックを使用して画面に表示されます。 これにより、桁の高さを XNUMX 行にすることができ、画面からの読み取り速度が大幅に向上しました。 トリップコンピュータは、SB1「M」(分の設定)、SB2「H」(時間の設定)、SB3「P」(表示モード)のボタンを使用して制御します。 画面右下のSB3ボタンを連打すると、電力量単価(図5、a)、平均速度(図5、b)、5日あたりの走行距離(図5、c)の代わりに表示されます。 )、バッテリー充電量 (図 5、d)、または電気モーターによって消費される電力 (図 XNUMX、e)。
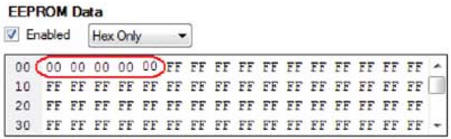
SB3ボタンを5秒以上押すと、車輪周長設定モードに移行します(図5 f)。 さらに押し続けると、ホイールの周長が1~201cm(215インチホイール)まで26cm単位で変化します。 電源投入時は車輪周長が210cmに設定されており、SB5ボタンを離して3秒後に車輪周長設定モードが終了し、設定値がマイコンのEEPROMに書き込まれます。 マイクロコントローラーをプログラミングするときは、最初の 6 つの EEPROM セル (図 1525,7) にゼロを書き込み、移動距離の初期値をゼロに設定する必要があります。 これを行わないと走行距離はXNUMXkmとなります。
プログラムは、電動自転車が停止してから 3 秒後にマイコンの EEPROM に移動距離を保存します。 録音の瞬間を示すために、LCD の右上隅にアスタリスク記号が 0,3 秒間表示されます。 電源がオフになると、プログラムは電力量の単価、平均速度、XNUMX 日の走行距離の値をリセットします。 デバイスをセットアップするには、バッテリーの代わりに、出力電圧 25 ~ 50 V、許容負荷電流 5 A 以上の実験用電源を使用できます。負荷同等物として、強力な電源を使用できます。抵抗値が 5 ~ 10 オームのワイヤ抵抗器。 以下の順序で機器の設定を行ってください。 まず、電圧計を校正します。 これを行うには、バッテリーまたは実験室用電源からデバイスに電圧を印加し、正確なデジタル電圧計で制御します。 同調抵抗器R9の抵抗を変更することによって、例示的な電圧計と調整されるデバイスと同じ測定値が得られる。 次に、電流計が校正されます。 正確なデジタル電流計が負荷と直列に接続されています。 供給電圧を印加することにより、同調抵抗器R13の抵抗を変化させることにより、例示的な電流計と調整されるデバイスと同じ測定値が得られる。 必要に応じて、抵抗 R25 を選択することにより、インジケーター上の最適な画像コントラストが設定されます。 トリップコンピュータは、適切なプラスチックまたは金属のケースに取り付けることができます。 Sprint Layout 5.0 形式のトリップ コンピューター回路基板ファイルおよびマイクロコントローラー プログラム: ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip。 文学
著者: A. ネフェディエフ
交通騒音がヒナの成長を遅らせる
06.05.2024 ワイヤレススピーカー Samsung ミュージックフレーム HW-LS60D
06.05.2024 光信号を制御および操作する新しい方法
05.05.2024
▪ タムロン 16-300mm F/3.5-6.3 Di II VC PZD マクロ レンズ (モデル B016) ▪ 新たな島が出現
▪ デビッド・エミール・デュルケームによる記事。 有名な格言 ▪ 記事 磁器とファイアンス用のセメント。 簡単なレシピとヒント ▪ 抵抗器の記事。 コードマーキング。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |




 この記事にコメントを残してください:
この記事にコメントを残してください: