|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
無線電子工学および電気工学の百科事典 電子釣竿マシン。 無線エレクトロニクスと電気工学の百科事典
最も臆病な試みでさえ、人が「自分のもの」と見なすことに慣れているいくつかの機能を電子機器に転送しようとするため、かけがえのないものであり、自分自身に対して警戒心を引き起こします。 最後になりましたが、これはアマチュア釣りにも当てはまります。これは、人間の趣味の最も保守的な形の XNUMX つです。 無線アマチュア デザイナーにとって、これ以上に興味深い活動を想像することは困難ですが。 ここで発生する問題の定式化から、「直感のアルゴリズム化」から発明されたもののテストまで。 そして、私たちが最近緊急に呼び出された仮想空間ではなく、まさに現在、青い空の下、森や牧草地に囲まれ、バーコードのない水と魚が飛び散っています。
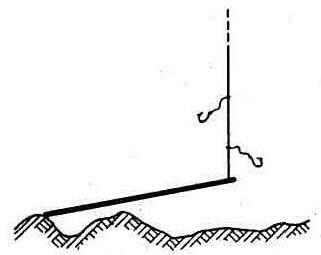
困難な釣り条件で魚を自動的に引っ掛けるために設計された装置の運動図を図1に示します。 ここでは:1 - マシンの電子機械的な「詰め物」全体を収容するハウジング。 2 - 板ばね、機械の主な発動機。 b-釣り糸7のクリップ11を備えたバネ仕掛けのロッカー。ブラケット4で形成され、絶縁プレート3に取り付けられ、接触対。 8 - フックイヤリング9でスラスト。 10 - 端に MZ ねじが付いたギアボックス シャフト。 12 - 機械を船上またはボートの船尾トランサムに固定するためのクランプ。 コック状態では、機械はギアボックスのシャフト 10 とイヤリング 9 のカップリングによって保持されます。エンジンのスイッチを入れると、ローターが数回転すると、このカップリングが即座に切断されます。 しかし、これがどの時点で発生するかは、機械の電子機器が決定します。 その作業のアルゴリズムは単純です。 ロッカー 6 がブラケット 4 に接触した瞬間に発生するセンサーの最初の電気信号により、マシンがアクティブ状態に切り替わります。カウントダウンが開始され、これらの接触のカウントが開始されますが、これらの接触の原因はまだ不明です。 オートマトンのこのアクティブな状態(持続時間が設定されている)での合計数(干渉とバイトの両方)が特定の数N(これも設定されている)に達しない場合、オートマトンは再び初期状態、つまり待機状態になります。 この数に達すると、電気モーターがオンになり、フックされます。 このアルゴリズムは、マシンの電子的な「スタッフィング」によって実装されます。その概略図を図 2 に示します。 XNUMX. ここでは: SF1 - コンタクト ペア「ロッカー ブラケット」 - システム センサー。 SF2 - コンタクトペア「レデューサーイヤリングのシャフト」(レデューサーと電気モーターはベースインシュレーターに配置されます); SA1 - トグルスイッチ。SA1.2 の接点が開くと、セットアップ時に機械の電源部分がオフになり、餌が変更されます。 SA2 - 「バイト」数を設定するスイッチ - N О{2,3,4}; SA3 - アクティブな時間間隔の間の切り替え (秒単位) - T О{2、4、8}。
要素 DD1.1、DD1.2、C2、R4 は、SF3 センサー接点の「バウンス」から「バイト」カウンターでの DD1 の誤カウントを排除する単一のバイブレータを構成します。 要素DD2.2、DD2.3では、クロックパルスジェネレータが組み立てられ、1 Hzの周波数で追従します。 これらのパルスを合計するカウンターDD4は、マシンのアクティブ状態の時間を設定します。 カウンターをリセットし、マシンを元の状態 (待機状態) に戻すことは、要素 DD2.1 および DD1.3 によって生成される「単一」振幅のパルスによって実行されます。 これは、アクティブ時間の終了時 (SA3 スイッチ エンジンに高レベルの電圧が現れたとき)、切断の開始時 (SF2 接点が切断されたとき)、またはマシンが次のように手動でオフになったときに発生します。 SA1 トグル スイッチ - SA1.1 接点ペアを閉じます。 エレメント DD2.4、DD1.4 およびトランジスタ VT3、VT4 には、(入力 2 エレメント DD2.4 によって) 制御されたトーン ジェネレータが組み込まれています。トーン ジェネレータは、ダイナミック ヘッド HA1 を励起することによって、マシンの遷移について釣り人に信号を送ります。アクティブな状態に。 トランジスタVT1およびVT2 - 電気モーターM1を制御するための電子キー。 LC フィルタのインダクタ L1 は、フェライト製の環状磁気回路 (外径 - 10 ... 12 mm) に巻かれています。 m=1000...2000。 その巻線には、ワイヤ PEV-50 100...2 が 0.2...0.3 回巻かれています。 板ばね(図 2 の 1) - 機械のメイン ムーバー - は、厚さ 0,8 mm のリン青銅のストリップから作られています。 幅は 78 で、長さ (埋め込まれた端を除く) は 220 mm です。 切断中にスプリングによって発生する初期力は 1,3 kg、「最大」 - 最大 750 mm です。 結び目 7 - 釣り糸を通すための穴がある通常の端末。 コンタクト ブラケットの寸法は重要ではありません。コンタクト パッドとそれらの間を移動するロッカー アームの端部の間に必要なギャップを設定できることだけが重要です: 最小 - 1、最大 - 10 mm。 ブラケットの接点に対するロッカーの位置は、ノード 5 のスプリングを引っ張ったり緩めたりすることで変更できます。魚を「保持」するため、これらすべての要素の全体的な機械的強度は十分に高くなければなりません。 いずれにせよ、彼らは10 ... 15キログラムのジャークと打撃に耐えなければなりません。 ロッカーがスイングするスクリュー軸は、最小限の抵抗を提供する必要があります。 機械のトリガー装置と、十分に厚い(8 ... 10 mm)シート有機ガラスまたはパッチ蓋付きの箱の形の耐衝撃性ポリスチレンから接着されたケース内のその部品の配置を図に示します。 3、a。 電気モーター1 - 直径7 ... 5、長さ6 mm以上の小さなギア5を軸に持つ、たとえば電化されたおもちゃからの小型の低電力(大きなギア4はそれに沿って自由に移動し、イヤリングからねじを外します)。 電気モーターを取り付ける前に、ローター巻線の絶縁品質を確認する必要があります - 漏れ抵抗は少なくとも1MΩでなければなりません。 XNUMX 倍から XNUMX 倍の減速を提供する適切な大型ギア ギアが同じおもちゃの中にあります。 トリガーのその他の詳細: 6 - ギアボックス シャフト (スチール)。 2番目の内部サポート(本体の「底」に取り付けられています); 3-シャフトの柔らかい板ばね、それを押し出します。 5 - ブロンズまたは真鍮のベアリングをハウジングの壁に押し込みます。 バネ張力を備えた歯車シャフト カップリング イヤリングは、図 3 に示すバリエーションに従って作成できます。 25b. この場合、直径約 1 mm の穴をハウジング カバーに開ける必要があります (図 3 の位置は矢印 A で示されています)。そのシャフトの端はイヤリングにねじ込まれています。 これは非常に信頼性の高いヒッチであり、外部からの影響はほとんどありません。 別のオプション(図XNUMX、c)によると、楕円形の穴の下部にのみスレッドが保持されているイヤリングは、ハウジングから突き出ているギアボックスシャフトの端に単に投げ込まれます。
アンダーカットは、SA1 スイッチ エンジンに "2" (供給電圧に近い電圧) が現れることから始まります。 この電圧は、カウンターDD3のカウント入力をブロックし(CPに従って、SF1センサーからの信号はその状態を変更できなくなります)、トランジスタVT1、VT2で行われた電子キーを開くと、電気モーターM1がオンになります。 ローターが 8 ~ 10 回転すると、「ギア シャフト - スラスト イヤリング」アセンブリが外れ、パワー スプリングが急激にまっすぐになり、フックが発生します。 しかし、要素DD2の入力12でこのノード(接点ペアSF2.1)が切断された瞬間に、「単一」電圧が発生し、「1」が現れ、カウンターの入力Rにつながります。 DD3. その結果、カウンターは元の「ゼロ」状態に戻り、SA2スイッチエンジン(ゼロバスの電位に近い電圧)で「0」が復元され、トランジスタVT1、VT2が閉じ、電気モーターが作動します。必要な回転数だけオフします。 マシンのリロードは、SA1 トグル スイッチをオフにして実行されます。この位置で短絡された SA1.1 接点ペアは、マシンの電子機器を起動前の状態に「保持」します。 オートマトンの遅延、つまりスイッチエンジンSA1の信号2の出現と実際のフックの間の時間は、電気モーターの速度と出力(強く強制される可能性があります)、ギアボックスの減速、イヤリングに挿入されたシャフトスレッドの数によって異なります、回転部品の潤滑、そしてもちろん動力源の状態。 製造されたコピーでは、0,2 秒を超えませんでした。 SF1センサーの感度は10 g / mmです(力 - 釣り糸、動き - 接触ブラケットで)。 ロッカースプリングの柔らかさによります。 4 ボルトの電気モーター (取り付けられていないおもちゃから) を装備した機械の電源は、0,5 つのガルバニ電池のバッテリー、または短期間の放電中に 1 ... XNUMX A の電流を供給することができるバッテリーにすることができます。 XNUMX 分の XNUMX 秒) 栄養価が高くなる可能性があります。 しかし、もちろん、マシンのマイクロ回路に許容される最大値を超えてはなりません。 説明されている電子オートマトンは、ロシア科学アカデミー極東支部の海洋生物学研究所の海洋実験ステーション(ポポフ島、レイニケ島、リコルド島などの水域)で長い間テストされました。 )。 主に水深20~25メートルの底魚を狙って釣りをしていました。 そして、海釣りの特徴-ピッチング、風下でのボートの移動、不均一な底、その他の障害-は、マシンにとって非常に難しいタスクを設定しましたが、実際には経験豊富な釣り人に劣るものではありませんでした。 そして、彼はしばしば彼の優位性を示しました...機関銃は、重要な組織に損傷を与えることがほとんどなく、きちんとしていることでも際立っていました。 水槽に移植するために魚も捕獲されたので、これは嬉しい驚きでした。
この図は、Primorye で採用されているものに近い機械の通常の装備を示しています。メインの釣り糸 0,7 ... 1 mm、リーシュ - 0,5 ... 0,6 mm 3 ... 5 cm の長さ、シングル フック No. 10。 ..12。 しかし、おもりは異なります。直径6 ... 8、長さ250 mm以上の鋼棒です。 このようなおもりと底の位置により、興奮が目立っても釣り糸の張力をほとんど変化させずに保つことができます。 しかし、これは機械自体の電子的な「思考」に加えてのものです。 「半分の水で」魚を捕まえることは、彼にとってまったく問題ではありませんでした。 マシンの実際の感度は、捕獲された標本の最小重量 - 50 ... 100 g で判断でき、魚の最大重量はリードの強さによってのみ制限されました。 出版物: cxem.net
スターシップのための宇宙からのエネルギー
08.05.2024 強力なバッテリーを作成する新しい方法
08.05.2024 温かいビールのアルコール度数
07.05.2024
▪ サイトのセクション インジケーター、センサー、検出器。 記事の選択 ▪ 記事 農業活動を通じて住居を成長させるアリは何ですか? 詳細な回答 ▪ 記事 風力タービンの計算。 無線エレクトロニクスと電気工学の百科事典 ▪ 記事 バッテリー駆動の高電圧源、9/10-500 ボルト 1,5 ミリアンペア。 無線エレクトロニクスと電気工学の百科事典
ホームページ | 図書館 | 物品 | サイトマップ | サイトレビュー
www.diagram.com.ua |




 この記事にコメントを残してください:
この記事にコメントを残してください: